

Một tấm thép không gỉ 10-gauge kích thước 5×10 không “cảm thấy” nặng cho đến khi bạn là người phải giữ đầu tấm khi lực ép 120 tấn từ thanh ram đi xuống.
Tôi đã thấy những người đàn ông trưởng thành dồn hết trọng lượng cơ thể của họ vào một tấm kim loại đang chùng xuống trong chu kỳ ép, giày trượt trên nền bê tông, cố giữ cho đường gập không bị lệch trong khi máy chấn vẫn tiếp tục ép xuống như thể nó chẳng quan tâm. Sản phẩm ra lò có một độ xoắn nhẹ. Mọi người đổ lỗi cho sai thời điểm. Hoặc thiếu kinh nghiệm.
Nhưng nếu ngay từ đầu, máy và bộ phận đỡ đã chống lại nhau thì sao?
Một tấm thép nhẹ dài 3 mét, dày 6 mm, đặt trên hai tay đỡ cố định trông có vẻ ổn định khi đứng yên. Khi bắt đầu chu trình, trọng lực chiếm ưu thế trước cả khi thanh ram chạm vào tấm. Phần đầu tự do hạ xuống vài milimét. Người vận hành điều chỉnh bằng cách nâng lên. Máy chấn vẫn tiếp tục đi xuống với tốc độ đã được lập trình sẵn.
Bây giờ bạn có ba lực cùng tác động: trọng lực kéo xuống, người vận hành đẩy lên, và thanh ram ép xuyên qua trục trung hòa của điểm gập.
Đó không phải là uốn. Đó là một cuộc kéo co.
Thùng phế liệu: Tôi từng loại bỏ mười hai tấm nhôm dài 8 foot trong một ca làm vì tất cả đều có sai lệch 1,5 độ dọc theo mép gập. Cùng một chương trình. Cùng bộ dụng cụ. Biến số duy nhất là hai người vận hành cố “giúp” bộ phận đỡ tĩnh bắt kịp với chu kỳ ép 90 tấn. Chúng tôi đã phải trả tiền cho những tấm đó hai lần—một lần cho vật liệu, một lần cho chi phí sửa lại.
Khoản “thuế” này không thể hiện rõ ở chi tiết đầu tiên. Nó xuất hiện dần trong mệt mỏi, trong những điều chỉnh nhỏ, và trong sai lệch dung sai tăng dần mà bạn không thể lý giải.
Vậy tấm kim loại thật sự bị biến dạng—hay người vận hành chỉ đang thua trong cuộc đua với máy?
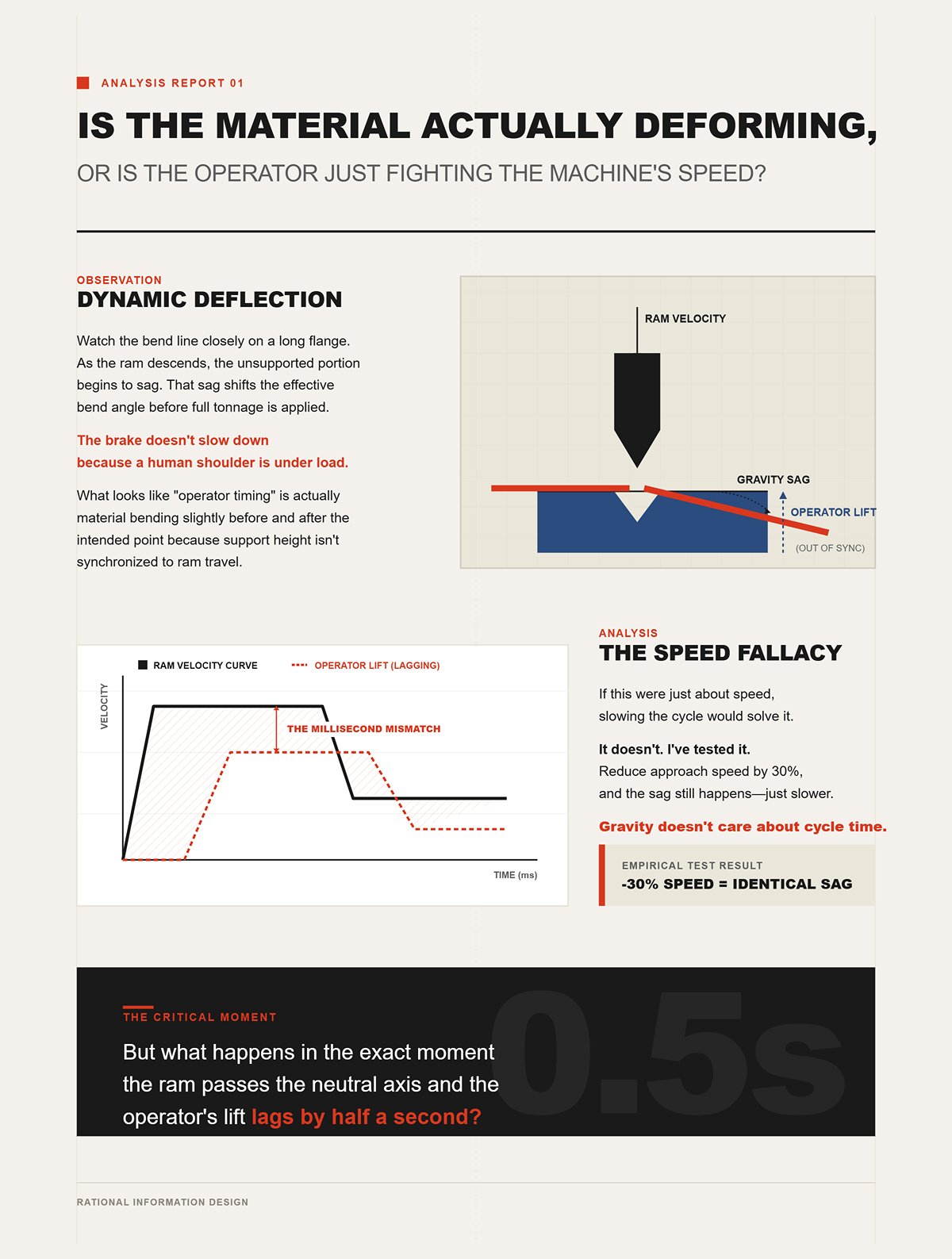
Quan sát kỹ đường gập trên một mép gập dài. Khi thanh ram hạ xuống, phần không được đỡ bắt đầu chùng xuống. Sự chùng này làm thay đổi góc gập thực tế trước khi lực ép đạt tối đa. Người vận hành cố nâng lên để bù lại, nhưng anh ta không thể khớp với đường cong tốc độ của ram từng mili giây.
Máy chấn không hề chậm lại chỉ vì vai người đang chịu lực.
Những gì trông giống như “lỗi thời điểm của người vận hành” thực ra là sự biến dạng động—vật liệu bị uốn nhẹ trước và sau vị trí dự định vì chiều cao của bộ phận đỡ không đồng bộ với hành trình của ram.
Nếu vấn đề chỉ nằm ở tốc độ, thì giảm tốc chu trình sẽ giải quyết được. Nhưng không. Tôi đã thử rồi. Giảm tốc độ tiếp cận xuống 30% và hiện tượng chùng vẫn xảy ra—chỉ là chậm hơn. Trọng lực không quan tâm đến thời gian chu kỳ.
Đây là lúc hầu hết các xưởng ngừng suy nghĩ. Họ cho đó là vấn đề đào tạo.
Nhưng điều gì xảy ra đúng lúc thanh ram vượt qua trục trung hòa và động tác nâng của người vận hành chậm hơn nửa giây?
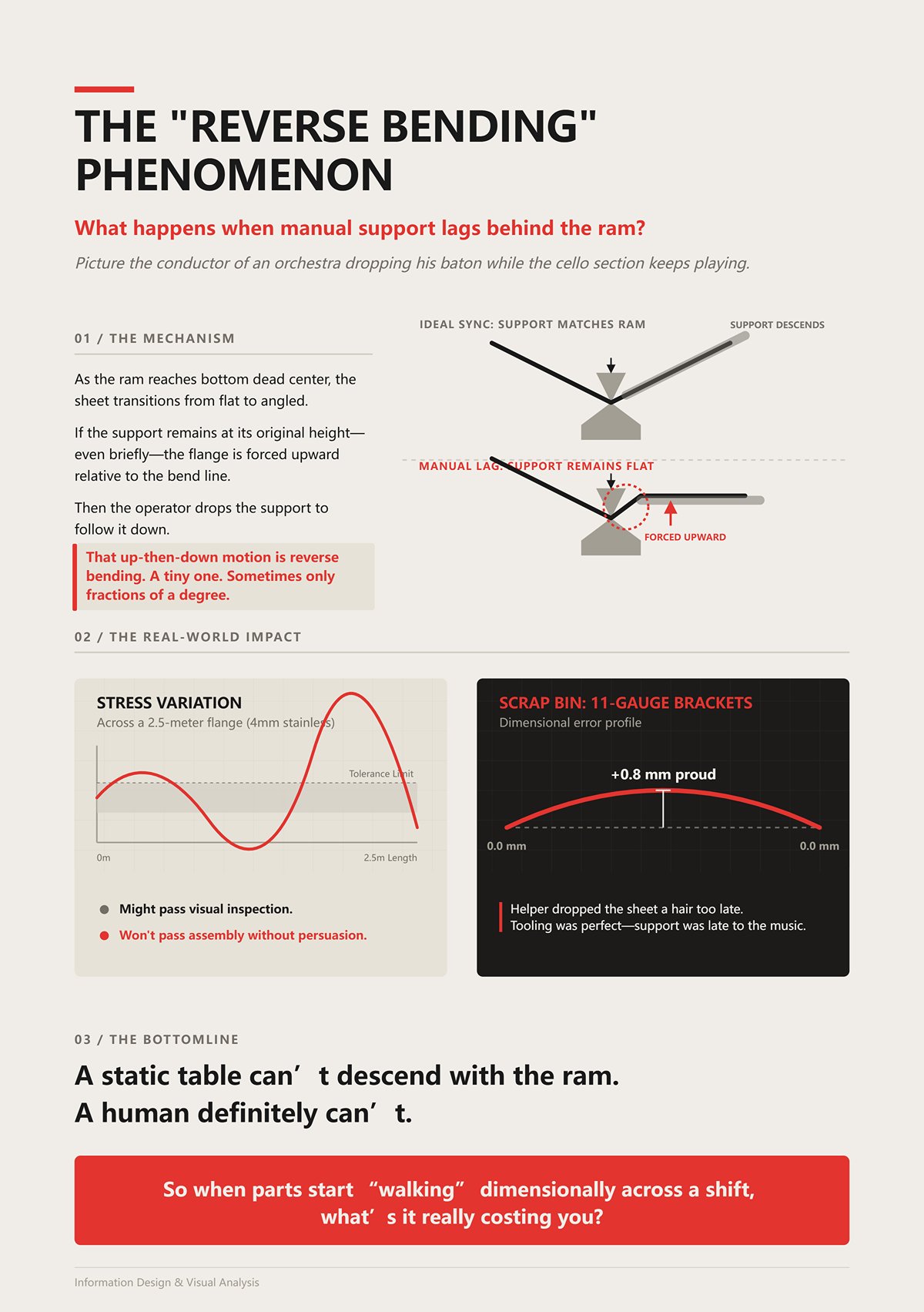
Hãy tưởng tượng nhạc trưởng của một dàn nhạc đánh rơi cây gậy chỉ huy trong khi dàn cello vẫn tiếp tục chơi. Đó chính là hiện tượng hỗ trợ thủ công bị trễ.
Khi trục ép đạt điểm chết dưới, tấm kim loại chuyển từ phẳng sang nghiêng. Nếu giá đỡ vẫn giữ nguyên độ cao ban đầu — dù chỉ trong chốc lát — mép tấm sẽ bị đẩy lên so với đường gấp. Sau đó người vận hành hạ giá đỡ xuống để theo kịp.
Chuyển động lên rồi xuống đó chính là uốn ngược. Một uốn rất nhỏ. Đôi khi chỉ là vài phần nhỏ của một độ.
Làm như vậy trên một mép dài 2,5 mét bằng thép không gỉ dày 4 mm, bạn sẽ tạo ra biến thiên ứng suất dọc theo chiều dài. Có thể nó sẽ qua kiểm tra bằng mắt. Nhưng sẽ không qua được giai đoạn lắp ráp nếu không phải "thuyết phục" nó.
Thùng phế liệu: Tôi đã thấy những giá đỡ thép cacbon dày 11 gauge đo đạt hoàn hảo ở hai đầu nhưng ở giữa lại đội lên 0,8 mm chỉ vì người phụ hỗ trợ hạ tấm xuống chậm một chút. Chúng tôi phải cắt bỏ và làm lại từ đầu. Không phải vì dụng cụ sai — mà vì giá đỡ xuống muộn so với “nhịp điệu”.
Một bàn tĩnh thì không thể hạ xuống theo trục ép. Con người thì chắc chắn càng không thể.
Vậy khi các chi tiết bắt đầu “trôi” kích thước trong suốt ca làm, điều đó thực sự đang khiến bạn tốn bao nhiêu?

Sự trôi giữa chu kỳ không thông báo bằng một tiếng nổ lớn. Nó xuất hiện dưới dạng sai lệch góc mà bạn phải đuổi theo bằng cách chỉnh độ lồi dao. Nó xuất hiện dưới dạng điều chỉnh bàn tỳ lùi mà lẽ ra không cần thiết. Nó xuất hiện khi cần hai người vận hành thay vì một cho các chi tiết dài.
Người vận hành thứ hai đó không phải miễn phí.
Trên một máy ép 135 tấn đang uốn các tấm thép thường dày 1/4 inch, việc thêm một người hỗ trợ có thể khiến chi phí nhân công trên mỗi chi tiết tăng gấp đôi. Dù phế liệu ít, mệt mỏi sẽ tăng. Và mệt mỏi làm thay đổi khả năng phán đoán. Lần nâng thứ mười trong một giờ không còn chính xác như lần đầu.
Thùng phế liệu: Tôi từng có một người vận hành kỳ cựu bị căng cơ vai do liên tục nâng tấm thép dày 7 gauge bằng tay trên các thanh đỡ tĩnh. Anh ấy không nghỉ làm. Chỉ là anh ấy ngừng hiệu chỉnh độ võng tích cực như trước. Tỷ lệ phế tăng từ 2% lên 9% trong ba tuần. Không ai nhận ra nguyên nhân là do mệt mỏi cho đến khi chúng tôi lắp bộ đỡ đồng bộ, và các con số giảm lại ngay trong đêm.
Đây là thay đổi tư duy mà tôi muốn bạn thực hiện:
Đừng xem bộ đỡ tĩnh là trung tính.
Nó không phải là “không làm gì”. Nó đang chủ động chống lại vật lý của quá trình uốn bằng cách đứng yên trong khi trục ép di chuyển. Mỗi chu kỳ không đồng bộ buộc người vận hành trở thành trục chuyển động còn thiếu.
Và khi con người trở thành một phần của hệ thống điều khiển, sự biến thiên không còn là tai nạn.
Nó được đảm bảo xảy ra.
Vậy nếu “thuế ẩn” không nằm ở kỹ năng người vận hành, cũng không chỉ ở tốc độ, thì điều đó nói gì về cơ chế của các bộ đỡ tĩnh?
Trên một máy ép thủy lực 135 tấn đang uốn tấm dài 3 mét bằng thép không gỉ dày 4 mm, hãy quan sát 50 mm đầu tiên của hành trình trục ép. Dao ép vẫn chưa tiếp xúc hoàn toàn. Tấm vẫn chủ yếu ở trạng thái phẳng. Các thanh đỡ tĩnh phía trước cố định ở một độ cao. Trọng lực đã bắt đầu kéo đầu tự do của tấm xuống.
Tay của người vận hành đưa lên trước khi lực nén tăng.
Đó là lỗi thiết kế hiển nhiên: một giá đỡ tĩnh chỉ có một bậc tự do—lên hoặc xuống khi bạn điều chỉnh thủ công. Cụm chày có đường cong vận tốc được lập trình, phản hồi vị trí, và độ lặp lại được đo bằng phần trăm của milimét. Khi chu trình bắt đầu, chỉ có một trong hai cái đang di chuyển theo chủ đích.
Chi tiết thành phẩm ra với một vết xoắn nhẹ.
Thùng phế liệu: Tôi từng chạy một lô thép cacbon dày 10-gauge—mép gấp dài 2,4 mét—trên các tay đỡ cố định cách đây nhiều năm. Chúng tôi làm chậm tốc độ tiếp cận, giảm tốc tăng lực ép, thậm chí điều chỉnh độ phồng mặt bàn. Năm chi tiết đầu tiên thì ổn. Đến chi tiết thứ mười lăm, góc bị lệch lên 0,6 độ ở một đầu. Không có gì thay đổi trong chương trình. Cái thay đổi là mức độ người vận hành nhấc tấm lên mạnh đến đâu khi cơ thể bắt đầu mỏi. “Hệ thống hỗ trợ” khi đó chính là cột sống con người.
Một tay đỡ tĩnh không chỉ không giúp ích; nó buộc người vận hành phải đóng một vòng điều khiển mà CNC nghĩ rằng mình đã nắm quyền. Giờ bạn có hai bộ điều khiển tác động lên cùng một tấm: máy ép đang dẫn đường cong gấp đi xuống, và người vận hành đang đẩy đầu tự do lên. Chúng không đồng bộ, và sẽ không bao giờ đồng bộ.
Nhưng nếu ngay từ đầu, máy và bộ phận đỡ đã chống lại nhau thì sao?
Khi máy ép tăng tốc qua giữa hành trình, trọng tâm của tấm dịch chuyển khi mép bắt đầu hình thành. Tải lên giá đỡ thay đổi theo động lực. Tay đỡ tĩnh không thể dự đoán được sự thay đổi đó. Một bộ theo dõi chủ động, ngay cả loại khí nén cơ bản được thiết kế chịu tải 380 kg, được chế tạo để đi lên và hạ xuống cùng với vị trí chày. Nó không loại bỏ hoàn toàn lực uốn ngược. Nó giảm bớt phần phán đoán cảm tính của con người gây ra hiện tượng đó.
Nếu một hệ thống được điều khiển theo vị trí còn hệ kia được điều khiển bằng cơ bắp, bạn nghĩ ai sẽ thắng khi tốc độ là 20 mm mỗi giây?
Lấy một thiết lập thông thường: thép mềm dày 6 mm, miệng khuôn chữ V rộng 48 mm—đúng theo quy tắc tám lần độ dày mà hầu hết các xưởng đều dùng. Khi chày hạ xuống miệng V, tấm kim loại không quay quanh một đường tưởng tượng trong không gian. Nó xoay quanh các điểm tiếp xúc ở vai khuôn. Vị trí trục xoay đó được xác định bởi hình dạng của khuôn.
Giờ hãy nhìn vào một giá đỡ trước tĩnh điển hình. Cánh tay đỡ xoay từ một giá treo bắt chặt vào khung máy, thường cách đường khuôn 300 đến 600 mm. Cung chuyển động của nó—nếu có—không liên quan gì đến hình học của miệng V.
Hai cung đó không đồng tâm. Thậm chí chúng không cùng một tâm.
Thùng phế liệu: Chúng tôi đã uốn tấm nhôm có vân dày 1/4 inch trên chiều dài 2,5 mét bằng khuôn V rộng 60 mm. Bàn tĩnh được chỉnh ngang lúc bắt đầu. Khi mép được tạo hình, sự quay tự nhiên của tấm muốn bám theo vai khuôn. Bàn tĩnh, cố định trong không gian, lại buộc mép phải trượt nhẹ lên rồi rơi xuống. Kết quả là một độ cong 1,2 mm dọc theo mép. Chúng tôi đổ lỗi cho “bộ nhớ vật liệu”. Thực ra đó là xung đột hình học.
Nếu điểm trục xoay hiệu dụng của giá đỡ không bám theo đường trục xoay của khuôn, bạn đang uốn tấm hai lần—một lần quanh khuôn như dự kiến, và một lần chống lại lực cản từ giá đỡ khi nó chống xoay. Độ cong thứ hai rất nhỏ. Chỉ là vài phần của độ. Nhưng trên 3 mét, vài phần độ biến thành vài milimét.
Các bộ theo dõi chủ động được thiết kế để tịnh tiến theo phương thẳng đứng, phối hợp với chuyển động của chày, luôn giữ điểm tiếp xúc gần tiếp tuyến đang thay đổi của tấm khi nó xoay quanh khuôn. Chúng không tự động hiệu chỉnh mọi yếu tố hình học—bề rộng khuôn, bề rộng tấm, chiều dài mép—but chúng loại bỏ cung cố định, mâu thuẫn mà tay đỡ tĩnh tạo ra.
Kết luận xưởng sản xuất: Nếu hình học trục xoay của giá đỡ không di chuyển cùng hình học trục xoay của khuôn, bạn đang tạo ra ứng suất ngược trong mọi mép dài.
Vậy ngay cả khi hình học giải thích được hiệu ứng uốn kép, chuyện gì sẽ xảy ra khi yếu tố thời gian được thêm vào?
Hãy xem một máy ép cơ khí chạy nhanh hơn ở đoạn giữa hành trình so với khi tiếp cận—điều phổ biến ở các máy dùng bánh đà cũ. Cụm chày có thể di chuyển 20 mm cuối cùng trước điểm chết dưới trong chưa đến một giây. Đường cong vận tốc đó là có thể dự đoán. Có thể lặp lại.
Giá đỡ tĩnh không có bất kỳ đặc tính vận tốc nào. Nó đứng yên cho đến khi con người phản ứng.
Nhưng điều gì xảy ra đúng lúc thanh ram vượt qua trục trung hòa và động tác nâng của người vận hành chậm hơn nửa giây?
Nửa giây đó chính là thời điểm độ chính xác CNC biến mất.
Tấm kim loại chuyển từ biến dạng đàn hồi sang chảy dẻo quanh trục trung hòa — lớp nằm trong bề dày không bị kéo giãn cũng không bị nén. Khi đi qua điểm đó, góc vành thay đổi nhanh chóng. Nếu chiều cao giá đỡ không hạ xuống cùng nhịp, vành tạm thời bị nâng quá cao. Khi người vận hành buông tay, vật liệu bật trở lại không đều theo chiều dài.
Thùng phế: Trên máy chấn 90 tấn uốn tấm dày cỡ 7 gauge, chúng tôi đã thử bù độ võng bằng cách nâng sẵn đầu tự do cao hơn mức ngang. Cách đó “hiệu quả” với các vành ngắn. Với chi tiết dài 2,8 mét, phần giữa chạm trục trung hòa chậm hơn hai đầu vài phần nghìn giây do sai khác nhỏ về độ dày vật liệu. Hiệu chỉnh nâng đỡ đã sai nhịp. Chúng tôi đuổi theo sai số 0,9 độ trên 40 chi tiết trước khi phải thừa nhận vấn đề không phải là lực chấn – mà là độ trễ.
Bạn có thể làm chậm máy lại. Trọng lực vẫn tác động. Bạn có thể huấn luyện người vận hành. Thời gian phản ứng vẫn khác nhau — thường 200 đến 300 mili giây cho phản ứng thị giác – vận động khi chịu tải. Máy chấn thì không quan tâm.
Một bộ nâng đỡ đồng bộ — dù khí nén hay servo — gắn chuyển động thẳng đứng của nó với vị trí của đầu chấn, chứ không dựa vào cảm nhận của con người. Đúng, nó vẫn cần thiết lập. Đúng, cần xác nhận điểm tiếp xúc bằng đèn LED mà một số hệ thống dùng. Có mặt không có nghĩa là đã tiếp xúc. Nhưng khi đã gắn kết, tốc độ của nó khớp hoàn toàn với chuyển động được máy điều khiển.
Trên máy chấn CNC có độ lặp vị trí đầu chấn ±0,01 mm, dựa vào cánh tay cố định với độ chính xác ±phản ứng con người không phải là tiết kiệm. Đó là phá hoại.
Kết luận tại xưởng: Nếu giá đỡ của bạn không thể khớp theo vị trí và tốc độ của đầu chấn, thì độ chính xác CNC của bạn dừng lại ngay tại mép khuôn – và mọi thứ sau đó chỉ là phỏng đoán.
Vài tháng trước tôi đo thời gian uốn tấm nhôm dày 3/16 inch trên một máy chấn CNC hiện đại. Từ lúc đầu chấn tiếp cận tới khi chạm đáy, 18 mm cuối của hành trình đầu chấn mất 0,6 giây. Không chậm. Không dữ dội. Chỉ vừa đủ nhanh để nếu bộ nâng đỡ chần chừ, tấm cảm nhận được ngay.
Đó là mốc chuẩn. Nếu bộ nâng đỡ không thể theo dõi hành trình hạ 0,6 giây đó mà không vượt quá hoặc trễ nhịp, nó không còn là hỗ trợ – mà là cản trở chậm trễ.
Các tay đỡ tĩnh đã thua cuộc vì chúng không di chuyển. Giờ câu hỏi thật sự tinh tế hơn: khi đầu chấn tăng tốc, giảm tốc và điều chỉnh theo thời gian thực, loại truyền động nào có thể giữ đúng nhịp mà không tự tạo ra vấn đề thời gian riêng?
Hãy coi đầu chấn như nhạc trưởng. Bộ nâng đỡ chỉ có một nhiệm vụ — chơi đúng nhịp hoàn hảo. Hệ thống khí nén và servo đều tuyên bố làm được. Chỉ có một loại thực hiện mà không đoán mò.
Hãy hình dung một tấm phôi thép không gỉ dày 10 gauge, rộng 1,2 mét, vành ngắn 25 mm, khuôn V nhỏ. Tâm trọng lực thấp. Quay ít. Trong trường hợp hẹp đó, một tay đỡ cố định đặt chính xác ngang có thể hoạt động ổn.
Nhưng giờ hãy kéo dài chi tiết đó thành 2,5 mét và tăng vành lên 120 mm. Khối lượng phần chi tiết vươn ra ngoài khi uốn. Tốc độ quay tăng gần trục trung hòa. Giá đỡ phải hạ theo cung điều khiển tương ứng với điểm tì khuôn. Tay đỡ cố định thì hoàn toàn không hạ.
Thùng phế: Chúng tôi đã uốn các giá đỡ bằng thép cán lạnh 11 gauge, rộng 300 mm. Tay đỡ cố định hoạt động ổn trong 20 chi tiết đầu. Sau đó công việc thay đổi — cùng độ dày, nhưng dài 1,8 mét. Tới chi tiết thứ tám, góc tự do bị xoắn 1,4 mm. Tonnage và khuôn không đổi. Chỉ thay đổi chiều dài. Tay đỡ không hỏng vì yếu. Nó hỏng vì hình học và nhịp thay đổi trong khi nó vẫn đứng yên.
Một tay đỡ cơ khí không phải là “tự động hóa đơn giản.” Nó là không tự động hóa. Nó giả định tốc độ uốn, trọng lượng tấm và chiều dài vành nằm trong một phạm vi hẹp. Công việc sản xuất — đặc biệt trong các xưởng đa dạng sản phẩm — hiếm khi ở trong phạm vi đó lâu.
Kết luận tại xưởng: Tay đỡ cố định có thể dùng cho chi tiết ngắn, lặp lại; nó không thể bảo vệ vật liệu khi chiều dài, tốc độ và quay thay đổi.
Giờ chúng ta thêm chuyển động. Một bộ nâng đỡ khí nén sử dụng khí nén đẩy xy-lanh để nâng và hạ bàn đỡ. Về lý thuyết, gắn tín hiệu van với vị trí đầu chấn là bạn đã có đồng bộ.
Trong thực tế, không khí bị nén.
Điều đó quan trọng. Khi chày tăng tốc giữa hành trình, van điều khiển mở ra để xả khí từ xi lanh khiến bàn hạ xuống. Nhưng không khí bên trong không thoát ra ngay lập tức. Đường kính ống, lưu lượng của bộ điều chỉnh, và thậm chí cả dao động áp suất khí nén trong xưởng — từ 95 psi buổi sáng xuống 82 psi khi ba máy laser cùng khởi động — đều làm thay đổi thời gian phản hồi.
Bạn sẽ không thấy một độ trễ rõ rệt. Bạn sẽ thấy một độ trễ mềm. Một khoảng đệm 0,1 giây trong đó bàn chống lại trước khi chịu khuất phục.
Thùng Phế Liệu: Chúng tôi đã lắp một thiết bị theo dõi bằng khí nén được định mức 380 kg dưới tấm nhôm dày 1/4 inch, dài 3 mét. Ca sáng chạy trơn tru. Sau bữa trưa, chu kỳ hoạt động của máy nén tăng lên, áp suất đường ống giảm 10 psi. Thiết bị theo dõi hạ xuống chậm hơn một chút. Kết quả: góc uốn tại giữa vượt 0,6 độ so với hai đầu. Cùng chương trình. Cùng người vận hành. Khí nén khác nhau.
Khí nén có độ dung sai lớn và cấu trúc cơ học đơn giản. Ít điện tử hơn. Chi phí ban đầu thấp hơn. Và trong các xưởng chưa nâng cấp hệ thống điện, nó tránh được dòng điện cực đại mà một số hệ thống hoàn toàn điện yêu cầu. Nhưng khí nén mang vào một biến số sống động — sự ổn định áp suất — mà chày CNC của bạn không có.
Nhưng nếu máy và bộ hỗ trợ đã “đấu nhau” ngay từ đầu thì sao? Với khí nén, chúng có thể đồng bộ về lệnh điều khiển nhưng không đồng bộ về thời gian phản ứng.
Kết Luận Xưởng: Các bộ theo dõi bằng khí nén là một bước nâng cấp lớn so với tay đỡ tĩnh, nhưng tốc độ của chúng chỉ ổn định khi nguồn khí của bạn ổn định.
Một bộ theo dõi dẫn động bằng servo thay thế không khí có thể nén bằng mô-tơ và trục vít bi hoặc truyền đai. Phản hồi vị trí đến từ bộ mã hóa. Khi chày di chuyển 0,01 mm, bộ theo dõi có thể được ra lệnh di chuyển 0,01 mm. Không có độ đàn hồi. Không có suy giảm áp lực.
Trên một máy chấn 90 tấn uốn thép cacbon thấp dày 5 mm qua khuôn chữ V 40 mm, chúng tôi đã lập biểu đồ đường cong tốc độ của chày — tiếp cận chậm, tăng tốc giữa hành trình, và giảm tốc có kiểm soát ở đáy. Bộ theo dõi servo phản chiếu đường cong đó trong giới hạn dung sai đo được của bộ mã hóa. Biên độ sai lệch góc của chi tiết qua 30 mẫu nằm trong khoảng 0,2 độ từ đầu này đến đầu kia.
Loại độ lặp lại đó có ý nghĩa khi độ phẳng của gờ ảnh hưởng đến quá trình hàn về sau, hoặc khi bạn đang uốn inox dày 14-gauge đã được hoàn thiện bề mặt, không thể “chỉnh lại” sau đó.
Bây giờ đến phần chi phí. Hệ thống servo yêu cầu nguồn điện sạch hơn và kỹ năng xử lý sự cố cao hơn. Tôi đã từng thấy các máy chấn servo-thủy lực lai phải ngừng hoạt động do lỗi truyền động độc quyền, với hóa đơn sửa chữa $8,500. Khi điện tử hỏng, bạn không thể gõ nhẹ bằng cờ-lê và tiếp tục vận hành.
Vậy khi nào nó đáng giá?
Khi chi phí phế liệu vượt quá rủi ro sửa chữa. Khi chi tiết đủ dài để sai số 0,5 độ trở nên nhìn thấy được. Khi vật liệu đắt — chẳng hạn nhôm 5052 dày 3/16 inch theo giá hiện nay — và việc làm lại là điều không thể.
Kết Luận Xưởng: Nếu sai số dung sai hoặc chi phí vật liệu khiến ngay cả lỗi thời gian nhỏ cũng trở nên đắt giá, thì khả năng lặp lại của servo sẽ tự hoàn vốn nhờ tiết kiệm phế liệu.
Một tấm thép cacbon thấp dài 3 mét, dày 6 mm, nặng khoảng 140 kg. Cộng thêm tải động khi nó xoay, bạn sẽ tạm thời vượt quá trọng lượng tĩnh. Nhiều bộ theo dõi khí nén được quảng cáo có khả năng chịu tải từ 300 đến 400 kg. Trên giấy tờ, nghe có vẻ ổn.
Nhưng khả năng chịu tải được công bố giả định áp suất lý tưởng và hướng tải thẳng đứng. Trong quá trình uốn, trọng tâm của tấm dịch chuyển ra ngoài, tạo ra lực đòn bẩy. Xi lanh không chỉ nâng tải — mà còn chống lại mô-men xoắn.
Khi chày tiến gần điểm chết dưới, tải thay đổi nhanh chóng. Nếu xi lanh ở gần giới hạn lực cực đại, không khí sẽ bị nén nhẹ trước khi đẩy trở lại. Sự nén vi mô đó thể hiện thành độ võng của bàn đỡ.
Thùng Phế Liệu: Chúng tôi đã uốn tấm thép dày 8 mm, dài 2,4 mét, trên bộ theo dõi được định mức 400 kg. Tính toán tĩnh cho thấy an toàn. Khi hoạt động, bàn hạ xuống 3 mm giữa quá trình uốn. Góc gờ ở giữa khép nhiều hơn 0,8 độ so với hai đầu. Xi lanh không bị đánh giá thấp theo catalog — mà bị đánh giá thấp so với thực tế động học.
Ngược lại, hệ thống servo giữ vị trí bằng mô-men của động cơ và cơ cấu truyền động cơ khí, không phải bằng không khí bị nén. Chúng không bị mất chiều cao do dao động áp suất. Nhưng chúng sẽ hút dòng điện tức thời cao hơn khi chịu tải lớn, và các xưởng cũ có hệ thống điện hạn chế sẽ cảm nhận rõ sự tăng đột ngột đó.
Vì vậy, vấn đề không chỉ là khả năng nâng. Đó là kiểm soát động học khi tải trọng thay đổi.
Kết luận từ xưởng: Nếu các chi tiết của bạn dài, dày, hoặc có mô‑men xoắn lớn, xếp hạng khí nén trên giấy có thể không tương đương với sự ổn định khi vận hành.
Câu hỏi về truyền động không phải là sự sang trọng. Đó là về nhịp độ. Một bộ theo không thể khớp với đường cong tốc độ của bàn trượt—đặc biệt là pha hạ xuống 0,6 giây trên tấm nhôm dày 3/16 inch—không giải quyết bài toán đồng bộ hóa. Nó làm thay đổi hình dạng của vấn đề.
Và một khi bạn bắt đầu thay đổi vật liệu—nhôm mềm, thép không gỉ đàn hồi, thép cường độ cao—tấm kim loại tự nó bắt đầu phơi bày mọi điểm yếu của lựa chọn truyền động đó.
Một tấm nhôm 5052 dày 20 gauge dài 3 mét nặng chưa đến 18 kg. Một tấm thép A36 dày 1/4 inch dài 3 mét vượt quá 180 kg. Đặt cả hai lên cùng một máy chấn, với cùng một bộ theo, và bảo tôi rằng vật lý là như nhau.
Chúng thậm chí không nằm trong cùng một lập luận.
Nhôm bị chảy sớm và đàn hồi trở lại ở mức vừa phải. Thép không gỉ chống lại, lưu trữ năng lượng và bật lại mạnh hơn. Thép cường độ cao giữ nguyên cho đến milimét cuối cùng của hành trình, rồi giải phóng mô‑men xoắn vào dụng cụ như một lò xo cuộn. Bộ theo không chỉ giữ trọng lượng; nó còn phản ứng với cách mà tấm xoay, tăng tốc và giảm tải trong quá trình uốn.
Khi truyền động trễ, vật liệu mềm che giấu nó. Khi truyền động chậm lại do đàn hồi, thép cường độ cao sẽ phơi bày nó. Và khi bộ theo được làm quá chắc nhưng chậm, vật liệu mỏng biến nó thành cơ chế phóng.
Đây là nơi hầu hết các xưởng mắc sai lầm. Họ tính kích cỡ bộ theo dựa trên kilogram và quên mất hành vi.
Nhưng điều gì xảy ra khi chính vật liệu trở thành bộ khuếch đại?
Hãy hình dung tấm thép không gỉ 304 dày 22 gauge, dài 2,5 mét, được uốn thành gờ cao 40 mm. Tấm chỉ nặng 12 kg, nhưng tỷ lệ độ cứng so với khối lượng rất cao. Khi bàn trượt hạ xuống, trục trung hòa dịch vào phía bán kính trong, phần tự do bắt đầu quay, và quán tính chiếm ưu thế.
Nhưng điều gì xảy ra đúng lúc thanh ram vượt qua trục trung hòa và động tác nâng của người vận hành chậm hơn nửa giây?
Với tay đỡ tĩnh thấp hơn 5 mm, phần đang quay hạ xuống, chạm vào tay đỡ rồi bật lên. Chi tiết thành phẩm bị xoắn nhẹ. Không nghiêm trọng. Chỉ đủ để phần gờ lắc lư trên bàn kiểm tra.
Đó không phải là vấn đề trọng lượng. Đó là vấn đề về thời gian.
Một bộ theo khí nén với vùng đệm phản hồi 0,1 giây vẫn có thể vượt quá hành trình trên vật liệu mỏng vì khối lượng quá nhỏ để giảm dao động. Tấm gia tốc nhanh hơn luồng khí có thể ổn định. Bộ theo servo, được điều khiển để bám theo chiều cao của khuôn dưới trong giới hạn độ phân giải của encoder, di chuyển đồng bộ với bàn trượt. Tấm không bao giờ rơi tự do, nên cũng không bật lại.
Thùng phế phẩm: Chúng tôi đã chạy thép mạ kẽm dày 20 gauge, dài 3 mét, trên các tay trượt thủ công chịu tải 500 kg có phủ polyethylene. Sau 40 chi tiết, 6 chi tiết có độ sai lệch chiều cao gờ 1,2 mm ổn định ở giữa. Các tay trượt không yếu. Chúng chỉ bị trễ. Khi thay sang bộ theo đồng bộ, sai lệch giảm xuống dưới mức dung sai đo băng dính.
Tấm mỏng trừng phạt sự chậm trễ nhiều hơn là đòi hỏi sức mạnh.
Kết luận từ xưởng: Với vật liệu mỏng, tốc độ và đồng bộ hóa ngăn hiện tượng văng; khả năng nâng thô chẳng giúp gì.
Vậy nếu vật liệu mỏng đòi hỏi sự linh hoạt, điều gì xảy ra khi tấm nặng gấp mười lần?
Lấy thép A36 dày 1/4 inch, dài 3 mét. Khoảng 185 kg. Bây giờ uốn một vành mép 60 mm trên máy uốn ép 120 tấn với khuôn chữ V 40 mm. Ở giữa hành trình, trọng tâm của tấm dịch ra ngoài, tạo ra một cánh tay mô‑men xoắn dài khoảng nửa độ dài vành mép.
Tính toán một chút và bạn sẽ thấy bạn không còn đỡ 185 kg theo phương thẳng đứng nữa. Bạn đang chống lại một mô‑men uốn cố gắng kéo tay đỡ xuống dưới.
Các tay đỡ trượt tiêu chuẩn được xếp hạng 500 kg giả định tải trọng gần như thẳng đứng. Khi xuất hiện cánh tay quay 60 mm, thanh trượt tuyến tính chịu tải ngang mà nó chưa từng được thiết kế để chịu. Tôi đã đo được độ võng 2–3 mm ở đầu tay đỡ khi quay động trên tấm dày. Độ võng đó làm khép góc trung tâm trước các đầu tấm.
Thùng phế phẩm: Chúng tôi uốn thép mềm dày 10 mm, dài 2,4 m, dùng tay đỡ thủ công mở rộng có bi lăn. Tải tĩnh ghi là an toàn. Khi chịu tải, một tay đỡ bị cong vĩnh viễn 1 mm ngay tại khối gá. 25 chi tiết tiếp theo cho thấy góc chính giữa chặt hơn 0,7 độ. Tay đỡ bị cong trước khi thép bị uốn.
Các tay đỡ servo hoặc thủy lực được thiết kế gắn trong bàn truyền tải trọng trực tiếp vào khung máy uốn, không qua các tay đòn bị nhô ra. Kết cấu quan trọng hơn động cơ trong trường hợp này. Các loại thép cường độ cao—chẳng hạn S700 dày 6 mm—làm trầm trọng thêm vấn đề vì giới hạn chảy cao hơn khiến biến dạng dẻo xảy ra muộn, nghĩa là năng lượng đàn hồi nhiều hơn phản ứng lại tay đỡ trong quá trình quay.
Bạn có thể thiết kế lại chi tiết—mép ngắn hơn, bán kính lớn hơn—để giảm tải đó. Các xưởng thông minh đều làm vậy. Nhưng khi hình học cố định và tải trọng tăng, kết cấu trở thành yếu tố sống còn.
Kết luận tại xưởng: Khi độ dày tấm ở mức trung bình trở lên, các tay đỡ kiểu công‑xôn tự chúng trở thành phần tử uốn; các tay đỡ tích hợp gắn với khung chịu mô‑men mà không bị biến dạng.
Và ngay cả khi bạn giải quyết được vấn đề khối lượng và mô‑men xoắn, vẫn còn một biến số khác chờ làm hỏng ngày làm việc của bạn.
Bây giờ chuyển sang thép không gỉ 14‑gauge đã hoàn thiện sẵn với bề mặt chải No. 4. Khối lượng đảm đương được—khoảng 40 kg ở chiều dài 3 m. Khách hàng loại bỏ chi tiết chỉ vì một vết xước 30 mm.
Các tay đỡ thủ công thường dùng chèn polyetylen hoặc bàn chải. Tốt cho trượt tĩnh. Nhưng trong quá trình uốn đồng bộ, tấm không chỉ trượt; nó chuyển động theo cung tròn. Nếu bề mặt tay đỡ có ma sát cao, tấm sẽ kéo nhẹ khi quay, đặc biệt gần điểm chết dưới khi áp suất đạt đỉnh.
Tôi đã thấy nhiều xưởng đổ lỗi cho người vận hành vì các vết xước thực ra hoàn toàn do ma sát bề mặt gây nên.
Thùng phế phẩm: Với thép không gỉ 14‑gauge loại #4, dài 2 m, chúng tôi dùng tay đỡ khí nén có con lăn thép. Sau 60 chi tiết, xuất hiện các vệt mảnh song song với đường uốn. Con lăn sạch hoàn toàn. Nguyên nhân là trượt vi mô khi tấm quay và tay đỡ chậm lại. Chuyển sang con lăn phủ không gây vết và siết chặt đồng bộ hóa đã loại bỏ vết xước mà không cần chỉnh chương trình.
Thứ tự ưu tiên như sau: nếu thao tác nâng sai thời điểm, dù tấm chải mềm nhất cũng sẽ gây xước vì tấm tạm thời không được đỡ và rơi chạm vào bề mặt. Nếu nâng đúng thời điểm nhưng bề mặt tiếp xúc sai, bạn sẽ giữ được góc nhưng phá hỏng bề mặt hoàn thiện.
Độ nhạy vật liệu quyết định lỗi nào xuất hiện trước. Nhôm dễ chịu với vết xước nhưng để lộ sai lệch góc. Thép không gỉ che được sai lệch góc nhỏ nhưng trừng phạt ma sát. Thép sơn cường độ cao mắc cả hai lỗi.
Kết luận tại xưởng: Các bộ phận bảo vệ bề mặt rất quan trọng—nhưng chỉ sau khi hệ thống nâng được đồng bộ hóa; lỗi về thời điểm sẽ làm hư chi tiết trước khi lựa chọn vật liệu kịp tác dụng.
Hãy chọn tay đỡ phù hợp với đặc tính của tấm—khối lượng, độ cứng, độ đàn hồi ngược và bề mặt—thì hệ thống sẽ vận hành đồng bộ với chày. Bỏ qua điều đó, bạn không tiết kiệm được tiền với tay đỡ tĩnh. Bạn đang buộc máy và vật liệu tranh cãi trước mặt từng khách hàng.
Điều đó dẫn đến vấn đề tiếp theo: ngay cả khi tay đỡ tương thích hoàn hảo với vật liệu, làm thế nào nó có thể giao tiếp đủ tốt với máy uốn để duy trì nhịp độ đó?
Một tấm thép mềm dày 12‑gauge dài 3 mét chẳng quan tâm người hỗ trợ của bạn trông đắt đỏ đến mức nào. Nó chỉ quan tâm liệu người hỗ trợ đó có biết rằng đầu trượt (ram) sắp tăng tốc từ tốc độ tiếp cận 40 mm/giây lên tốc độ tạo hình 8 mm/giây trong 0,2 giây tới hay không.
Tôi đã từng đứng sau một máy chấn nơi đầu trượt rơi 150 mm trong 0,6 giây, và bộ hỗ trợ nâng lên rất đẹp — chỉ là hơi muộn. Chi tiết bị ra với một vết xoắn nhẹ. Không phải vì lực nâng yếu. Mà vì nó đang phán đoán.
Đó chính là ranh giới: bộ hỗ trợ của bạn đang phản ứng với chuyển động mà nó cảm nhận được sau khi xảy ra, hay nó đang chuyển động vì bộ điều khiển đã báo trước điều sắp xảy ra?
Nhưng nếu ngay từ đầu, máy và bộ phận đỡ đã chống lại nhau thì sao?
Hãy hình dung một máy chấn CNC 135 tấn đang chạy chuỗi 5 lần chấn trên thép không gỉ dày 10‑gauge, dài 2,5 mét. Vị trí của đầu trượt được theo dõi bằng thước đo tuyến tính với độ chính xác đến phần trăm milimét. Bộ điều khiển đã biết trước lượng giãn uốn, chiều cao dụng cụ, bù độ đàn hồi vật liệu, và chính xác thời điểm nó sẽ giảm tốc trước điểm chết dưới.
Giờ gắn thêm một bộ hỗ trợ độc lập, đọc vị trí đầu trượt qua cảm biến tiệm cận và vận hành bằng PLC riêng.
Nó có thể thấy đầu trượt đang ở đâu. Nó không thể thấy đầu trượt sắp đi đâu.
Sự khác biệt đó là tất cả.
Trong một hệ thống nối mạng hoàn toàn, bộ hỗ trợ nhận cùng lệnh vị trí mà đầu trượt nhận. Khi bộ điều khiển chuyển từ tốc độ tiếp cận nhanh sang tốc độ tạo hình, servo của bộ hỗ trợ cũng thay đổi trong cùng vòng điều khiển — “vòng kín” nghĩa là cả hai trục liên tục điều chỉnh dựa trên phản hồi từ thước đo. Chúng chia sẻ ý định, không chỉ vị trí.
Trong một hệ thống cải tiến độc lập, bộ hỗ trợ đợi có chuyển động rồi mới phản ứng. Chỉ cần trễ 100–150 mili giây là đủ để tấm dài 3 mét võng xuống 4–6 mm ở giữa khi giảm tốc. Với nhôm mỏng 16‑gauge, phần võng đó bật ngược lại khi đầu trượt chậm lại. Với tấm dày 8 mm, nó truyền mô men xoắn vào đường uốn và làm kín góc giữa.
Thùng phế: Chúng tôi đã chạy thép không gỉ 304 dày 3 mm, dài 3 mét, trên một bộ hỗ trợ cải tiến chỉ nối với chuyển động đầu trượt thông qua thước đo tuyến tính. Góc ở hai đầu giữ trong ±0,3 độ. Ở giữa lệch 0,8 độ chặt hơn trên 30 chi tiết. Bộ hỗ trợ không yếu. Nó chỉ trễ ở mọi giai đoạn chuyển tốc độ.
Nếu bộ hỗ trợ của bạn không biết đầu trượt sắp làm gì, nó luôn phản ứng — và phản ứng chính là nguyên nhân khiến chi tiết lệch.
Kết luận xưởng: Nếu thời gian là yếu tố quan trọng — và luôn là như vậy — thì bộ hỗ trợ phải chia sẻ cùng vòng lệnh với CNC, chứ không thể chạy theo từ phía sau.
Vậy còn những máy chấn thủy lực đời cũ vốn không được thiết kế để “trò chuyện” kiểu đó thì sao?
Hãy lấy một máy chấn thủy lực năm 1998 với điều khiển NC cơ bản — không có giao thức truyền thông mở, không có bus servo, chỉ có bộ chặn độ sâu đầu trượt và định vị chốt lưng. Bạn có thể lắp một bộ hỗ trợ độc lập với bộ điều khiển riêng và lưu vị trí cho từng bước chấn.
Với các lô thử nghiệm nhỏ — mười chi tiết, một lần uốn — nó hoạt động tốt. Bộ hỗ trợ nâng lên độ cao cài sẵn, giữ, rồi hạ xuống. Độ chính xác có thể so sánh được vì hồ sơ chuyển động đơn giản.
Giờ hãy chạy một thiết lập 4 trạm với các chiều cao khuôn khác nhau và chiều dài gấp thay đổi trên thép cán nóng 11‑gauge dài 2,8 mét.
Không có dữ liệu uốn trực tiếp — tốc độ đầu trượt theo thời gian thực, bù chiều cao dụng cụ, hiệu chỉnh góc động — người vận hành phải tự đặt lại độ cao bộ hỗ trợ cho từng trạm hoặc dựa vào các giá trị lưu trữ giả định tốc độ tiếp cận và tạo hình giống nhau. Bất kỳ thay đổi nào trong lực chấn hoặc lô vật liệu đều làm thay đổi thời điểm chuẩn.
Điều gì xảy ra đúng lúc đầu trượt đi qua trục trung hòa mà thao tác nâng của người vận hành trễ nửa giây?
Trên các hệ thống thủy lực cũ, tốc độ của xy lanh có thể thay đổi theo nhiệt độ dầu và tải trọng. Một bộ theo dõi độc lập được thiết kế cho tốc độ tạo hình 12 mm/giây có thể chỉ đạt 9 mm/giây vào buổi sáng lạnh. Sự chênh lệch 3 mm/giây đó trong hành trình 80 mm đủ để làm mất đồng bộ lực hỗ trợ trong giai đoạn xoay quan trọng nhất.
Thùng phế liệu: Chúng tôi đã cải tiến thêm một bộ theo dõi vào máy chấn thủy lực 160 tấn uốn tấm A36 dày 6 mm, dài 2,4 mét. Ca sáng tạo ra các chi tiết đồng nhất. Sau bữa trưa, khi dầu ấm lên và tốc độ xy lanh tăng nhẹ, góc giữa mở ra thêm 0,6 độ. Chương trình không thay đổi. Nhưng cửa sổ thời gian của bộ theo dõi thì có.
Một bộ độc lập có theo kịp không? Có thể—nếu công việc đơn giản, sản lượng thấp và dung sai rộng.
Nhưng khi các chuỗi uốn chồng lên nhau, chiều cao dụng cụ thay đổi và lực ép biến thiên, các vị trí được lưu trở thành giả định. Mà giả định trong thép là điều tốn kém.
Kết luận từ xưởng: Các bộ cải tiến độc lập chỉ thích hợp cho công việc đơn giản, có thể dự đoán; còn các công việc phức tạp nhiều bước uốn sẽ nhanh chóng bộc lộ điểm mù của chúng.
Và những điểm mù đó không chỉ liên quan đến thời gian hoạt động.
Hãy đến gần một máy chấn có bốn trạm khuôn trải dài trên 3 mét—khuôn chữ V 20 mm, V 40 mm, khuôn gấp mép, rồi đến chày cổ ngỗng cao ở đầu xa. Đó là cách các xưởng thực tế vận hành các chi tiết hỗn hợp mà không cần tháo lắp liên tục.
Giờ thêm một bộ theo dõi đỗ cách sau khuôn dưới 400 mm khi không sử dụng.
Nếu nó không giao tiếp với CNC về vị trí trạm, nó chỉ có một mặc định an toàn: giữ thấp và tránh xa. Điều đó nghĩa là giữa các lần uốn, nó phải rút hoàn toàn, rồi nâng lên lại đến độ cao định sẵn. Mỗi chu kỳ thêm thời gian di chuyển và nguy cơ tái tham gia không đúng lúc.
Các hệ thống mạng hóa hoàn toàn liên kết vị trí của bộ theo dõi với chính chương trình uốn. Khi người vận hành chọn trạm thứ ba, bộ điều khiển đã biết chiều cao khuôn và ra lệnh cho bộ theo dõi vào vị trí chờ đồng bộ—tránh xa dụng cụ nhưng vẫn trong khoảng 10–15 mm so với độ cao làm việc. Không phải đoán mò. Không cần đặt lại toàn hành trình.
Thùng phế liệu: Trong thiết lập độc lập, chúng tôi chạy xen kẽ các bước uốn giữa khuôn V 30 mm và khuôn gấp mép trên thép sơn dày 14 gauge. Bộ theo dõi phải hạ hoàn toàn giữa các trạm để tránh va chạm với dụng cụ. Thời gian chu kỳ gần như tăng gấp đôi. Tệ hơn, một lần nâng sai thời điểm đã va vào vai khuôn và làm xước tay đỡ của bộ theo dõi.
Khi bộ theo dõi không được tích hợp vào logic trạm, nó trở thành một vật cản di chuyển. Người vận hành bắt đầu tránh các thiết lập nhiều trạm chỉ để giữ bộ theo dõi dễ kiểm soát. Và điều đó phá hỏng chính hiệu quả mà việc cải tiến thêm định mang lại.
Kết luận từ xưởng: Nếu bộ theo dõi không biết bản đồ dụng cụ của bạn, nó sẽ hoặc làm chậm chu kỳ hoặc va chạm vào đó.
Tích hợp không chỉ là phần mềm. Đó còn là cách điện năng và chuyển động được kết nối với nhau.
Tôi đã thấy hai kiểu kiến trúc cải tiến phổ biến.
Đầu tiên: bộ theo dõi điều khiển servo điện gắn vào khung máy chấn, cấp nguồn độc lập, đọc chuyển động của xy lanh thông qua tín hiệu nối hoặc thước đo bên ngoài.
Thứ hai: bộ theo dõi thủy lực lấy nguồn từ mạch thủy lực của máy chấn thông qua các van tỉ lệ.
Servo điện có độ chính xác trên lý thuyết—độ phân giải của encoder, tốc độ lập trình được. Nhưng nếu nó không kết nối vào đường truyền điều khiển chính của máy chấn, nó sẽ chạy song song, chứ không đồng bộ. Hai bộ điều khiển, hai vòng phản hồi. Khi tải tăng đột ngột—ví dụ khi uốn tấm dày 8 mm gần mức tải cực đại—máy chấn có thể vi điều chỉnh vị trí xy lanh để kiểm soát góc, trong khi bộ theo dõi vẫn tiếp tục theo quỹ đạo đã lập trình. Sự lệch này thể hiện rõ dưới dạng sai lệch góc ở giữa.
Bộ truyền động thủy lực kiểu “piggyback” mang lại cảm giác “đồng bộ tự nhiên” vì chúng chia sẻ chung dầu. Tuy nhiên, trừ khi dòng chảy được điều khiển điện tử và phối hợp thông qua CNC, các thay đổi áp suất trong xi lanh chính sẽ ảnh hưởng đến lưu lượng cung cấp cho bộ theo dõi. Ở mức tải lớn, tốc độ nâng của bộ theo dõi có thể giảm đúng vào thời điểm nhu cầu hỗ trợ đạt đỉnh.
Thùng Phế Liệu: Một bộ theo dõi thủy lực của bên thứ ba được kết nối với máy chấn 200 tấn hoạt động hoàn hảo trên nhôm dày 3 mm. Khi chuyển sang vật liệu S355 dày 10 mm gần mức tải tối đa, tốc độ nâng của bộ theo dõi chậm lại trong quá trình chấn. Trung tâm của chi tiết dài 2,5 mét bị võng 5 mm trước khi phục hồi. Góc biến thiên 0,7 độ dọc theo chiều dài. Đường ống dầu được chia sẻ, nhưng thời điểm hoạt động thì không.
Chúng thất bại ở đâu? Chính vào thời điểm tải cao nhất và quyết định phải được đưa ra nhanh nhất—khi thanh trượt điều chỉnh, giảm tốc hoặc bù cơ học.
Một hệ thống mạng hoàn chỉnh biến bộ theo dõi thành một trục được điều khiển khác trong cùng kiến trúc. Một người điều khiển. Một nhịp điệu. Khi thanh trượt thay đổi tốc độ, bộ theo dõi cũng thay đổi vì nó nhận được cùng một lệnh điều khiển.
Kết luận tại xưởng: Điện hay thủy lực không quyết định thành công—mà là logic điều khiển chung; nếu không có nó, bạn đang vận hành hai máy riêng biệt trên cùng một tấm vật liệu.
Vì vậy, câu hỏi bây giờ không còn là liệu bộ theo dõi có tiện ích hay không, mà là hành vi của vật liệu và kiến trúc máy của bạn có yêu cầu tích hợp thực sự—hay cho phép bạn chỉ phản ứng thụ động.
| Phần kết thúc | Nội dung |
|---|---|
| Chủ đề | Tích hợp Điện so với Thủy lực: Các Bộ Cải Tiến Bên Thứ Ba Thường Thất Bại Ở Đâu? |
| Kiến Trúc Cải Tiến Thông Dụng 1 | Bộ theo dõi servo dẫn động điện được gắn vào khung máy chấn, cấp nguồn riêng, đọc chuyển động của thanh trượt thông qua tín hiệu lấy mẫu hoặc thước đo bên ngoài. |
| Kiến Trúc Cải Tiến Thông Dụng 2 | Bộ theo dõi thủy lực dùng chung mạch thủy lực của máy chấn thông qua van tỷ lệ. |
| Servo Điện – Điểm Mạnh | Độ chính xác lý thuyết cao (độ phân giải encoder, tốc độ lập trình được). |
| Servo Điện – Điểm Yếu | Nếu không được tích hợp vào bus điều khiển chính, nó hoạt động song song với các bộ điều khiển và vòng phản hồi riêng. Dưới tải cao (ví dụ: tấm 8 mm gần công suất cực đại), các điều chỉnh vi mô của máy chấn có thể gây sai lệch, dẫn đến biến thiên góc ở giữa chi tiết. |
| Thủy Lực Kiểu Piggyback – Điểm Mạnh | Mang lại cảm giác đồng bộ tự nhiên nhờ hệ thống dầu thủy lực dùng chung. |
| Thủy Lực Kiểu Piggyback – Điểm Yếu | Nếu không có điều khiển lưu lượng điện tử phối hợp thông qua CNC, các biến động áp suất trong xi lanh chính sẽ ảnh hưởng đến lưu lượng của bộ theo dõi. Ở tải trọng cao, tốc độ nâng có thể giảm khi nhu cầu hỗ trợ đạt đỉnh. |
| Trường Hợp Thùng Phế Liệu | Bộ theo dõi thủy lực bên thứ ba trên máy chấn 200 tấn hoạt động tốt với nhôm dày 3 mm. Khi chuyển sang vật liệu S355 dày 10 mm gần mức công suất cực đại, tốc độ nâng của bộ theo dõi bị chậm lại trong quá trình tạo hình. Một chi tiết dài 2,5 mét bị võng 5 mm trước khi phục hồi; độ sai lệch góc đạt 0,7°. Dùng chung đường dầu, nhưng thời điểm hoạt động không đồng bộ. |
| Điểm hỏng | Sự cố xảy ra trong những thời điểm tải trọng cao nhất và yêu cầu ra quyết định nhanh nhất — khi đầu chấn điều chỉnh, giảm tốc hoặc bù trừ. |
| Hệ thống kết nối hoàn toàn | Tích hợp bộ theo dõi như một trục được điều khiển trong cùng một kiến trúc. Một hệ thống điều khiển duy nhất, lệnh đồng bộ. Thay đổi tốc độ đầu chấn và phản ứng của bộ theo dõi diễn ra đồng thời. |
| Kết luận tại xưởng | Thành công phụ thuộc vào logic điều khiển chung — không phải hệ thống điện hay thủy lực. Nếu không có sự tích hợp, thì thực tế đó là hai máy đang cùng xử lý một tấm kim loại. |
| Câu hỏi cốt lõi | Vấn đề không phải là bộ theo dõi có tùy chọn hay không, mà là hành vi của vật liệu và kiến trúc máy có yêu cầu tích hợp thực sự — hay có thể chấp nhận hoạt động phản ứng chậm. |
Bạn không quyết định chọn bộ theo dõi tích hợp hoàn toàn chỉ vì nó trông ấn tượng.
Bạn quyết định như vậy vì vật liệu, máy và danh mục sản xuất của bạn không còn lựa chọn ổn định nào khác.
Phần ít rõ ràng hơn là thế này: điểm giới hạn không chỉ nằm ở trọng lượng. Nó xuất hiện khi khối lượng tấm, độ võng, và trình tự uốn vượt quá khả năng con người và hệ hỗ trợ phản ứng có thể hiệu chỉnh kịp thời. Khi điều đó xảy ra, việc đồng bộ hóa không còn là một nâng cấp — mà trở thành công cụ cơ bản.
Vậy ranh giới đó nằm ở đâu trong xưởng của bạn?
Lấy một tấm phôi dài 3,0 mét bằng thép A36 dày 10 gauge. Khoảng 38 kg mỗi mét vuông. Với chiều rộng 1,5 mét, bạn đang giữ hơn 170 kg trước khi uốn lần đầu. Tấm này không chỉ nặng hơn — nó còn tích trữ năng lượng khi quay.
Khi đầu chấn di chuyển qua trục trung hòa, phần giữa có xu hướng sụp xuống. Không phải vì người vận hành yếu, mà vì trọng lực là hằng số và thép có tính nhớ.
Một giá đỡ tĩnh phía trước có tải trọng định mức 380 kg trên dẫn hướng tuyến tính có thể chịu được tải đó. Nó có thể phát sáng bằng đèn LED báo tiếp xúc. Nó có thể trượt êm. Nhưng nó không thể dự đoán chuyển động xoay. Nó chờ tấm di chuyển rồi mới phản ứng.
Thùng phế: Chúng tôi đã chạy thép S355 dày 8 gauge dài 2,8 mét trên máy chấn với các giá đỡ tĩnh hạng nặng có khả năng chịu tải cao hơn trọng lượng tấm nhiều. Công suất không phải là vấn đề. Giữa quá trình uốn, tâm tấm võng 6 mm trước khi người vận hành và giá đỡ điều chỉnh lại. Góc hai đầu đọc chặt, góc giữa mở 0,9 độ. Chúng tôi không làm quá tải giá đỡ — chúng tôi chỉ vận hành nhanh hơn khả năng phản ứng của nó.
Bây giờ chuyển sang thép không gỉ 304 dày 2 mm, dài 1,2 mét. Tổng trọng lượng dưới 25 kg. Trên máy chấn điện với khả năng kiểm soát góc chính xác, độ võng tối thiểu. Chuyển động xoay nhẹ. Người vận hành có thể điều khiển bằng đầu ngón tay.
Cùng một xưởng. Hai bài toán vật lý hoàn toàn khác nhau.
Phán Quyết Tại Xưởng: Khi khối lượng và độ mềm của tấm kim loại tạo ra chuyển động xoay giữa chừng mà con người không thể phản ứng kịp thời, thì bạn đang tính toán cho sự đồng bộ, chứ không phải cho khả năng nâng.
Nhưng vật liệu không hoạt động một mình. Nó uốn trong một máy có các giới hạn riêng.
Một máy ép chấn cơ khí chạy các chi tiết tốc độ cao, đánh một lần với độ sâu hành trình cố định thì dễ đoán trước. Thời gian hành trình hiếm khi thay đổi. Nếu bạn chạy các giá đỡ nhôm 3 mm suốt cả ngày, một bộ theo dõi servo độc lập gắn với vị trí trượt của chày có thể theo kịp khá tốt.
Nhưng đặt cùng bộ theo dõi đó lên một máy thủy lực hiện đại có cân bằng động và hiệu chỉnh góc theo thời gian thực, mọi thứ sẽ thay đổi. Cối trượt điều chỉnh tốc độ giữa hành trình. Nó bù lại độ đàn hồi. Nó hiệu chỉnh vi mô độ sâu.
Nếu bộ theo dõi không nằm trong cùng vòng điều khiển đó, nó chỉ đang đoán mò.
Thùng Phế Liệu: Chúng tôi đã cải tiến thêm một bộ theo dõi servo vào máy ép chấn thủy lực 220 tấn uốn thép không gỉ 304 dày 6 mm với tính năng hiệu chỉnh góc đang hoạt động. Trong quá trình uốn nặng, CNC làm chậm hành trình chày gần điểm thấp nhất để đạt góc mục tiêu. Bộ theo dõi, đang đọc một tín hiệu analog bị trễ, tiếp tục nâng lên theo chương trình. Chi tiết nhấc khỏi vai khuôn, rồi hạ trở lại. Sai lệch cuối cùng: 0,7 độ trên chiều dài 2,5 mét. Bộ theo dõi hoạt động chính xác. Nó chỉ đơn giản là không được mời tham gia cuộc đối thoại.
Giờ hãy xét một máy ép điện chính xác cao uốn thép mạ kẽm 1,5 mm. Truyền động điện cho hành trình lặp lại và kiểm soát vị trí chặt chẽ. Nhưng tải trọng thấp và độ uốn cong tối thiểu. Ở đây, việc tích hợp có thể tăng chi phí mà không giải quyết vấn đề thực tế nào.
Phán Quyết Tại Xưởng: Càng nhiều máy ép của bạn điều chỉnh theo thời gian thực dưới tải, bộ theo dõi của bạn càng phải chia sẻ kiến trúc điều khiển với nó, nếu không sẽ có nguy cơ chống lại nó.
Nhưng máy móc và vật liệu vẫn chưa trả lời câu hỏi tài chính. Sự pha trộn sản xuất mới là yếu tố quyết định.
Bạn đang chạy các lô dài của cùng một chi tiết, hay các đơn hàng 40 chi tiết thay dụng cụ mỗi giờ?
Một bộ cải tiến độc lập chỉ tồn tại dựa trên sự lặp lại. Một chiều cao khuôn. Một chuỗi uốn. Thay đổi trạm tối thiểu.
Giờ hãy thêm bốn trạm trên chiều dài 3 mét: V 20 mm, V 40 mm, khuôn gập mép, và chày cổ ngỗng cao. Thêm vật liệu hỗn hợp: thép cácbon thấp 4 mm buổi sáng, thép không gỉ dày 10 gauge sau bữa trưa. Thêm các công nhân thay ca.
Mỗi lần thay đổi buộc bộ theo dõi phải đặt lại vị trí, dọn khuôn, và tái khởi động.
Thùng Phế Liệu: Trong một tổ hợp công việc gồm các tấm thép sơn 12 gauge uốn xen kẽ giữa hai trạm khuôn, bộ theo dõi độc lập của chúng tôi phải rút hoàn toàn 300 mm giữa các lần uốn để tránh va chạm. Thời gian chu kỳ kéo dài từ 42 giây lên 71. Một lần trở về sai thời điểm đã làm xước bề mặt hoàn thiện. Chúng tôi không thua vì bộ theo dõi yếu. Chúng tôi thua vì nó không nhận biết được bối cảnh.
Sự tăng trưởng trong tương lai khiến điều này càng nhạy cảm hơn. Nếu đường ống báo giá của bạn cho thấy các chi tiết dài hơn, tấm dày hơn, dung sai chặt hơn, hoặc các tổ hợp nhiều lần uốn hơn, bạn đang chồng thêm các biến số gây trễ.
Phán Quyết Tại Xưởng: Nếu lịch sản xuất của bạn ưu tiên sự linh hoạt và hiệu suất đa trạm, chỉ có bộ theo dõi được tích hợp trong chương trình uốn mới bảo vệ được cả thời gian chu kỳ lẫn chất lượng chi tiết.
Vậy khi nào thì tất cả những điều này vượt qua ranh giới?
Đây là góc nhìn mà tôi hiện sử dụng với tư cách là một kiểm toán viên.
Nếu một người vận hành không thể về mặt thể chất và ổn định chống lại sự xoay của tấm trong quá trình uốn đòi hỏi cao nhất — mà không cần vội vàng, chống đỡ, hay đoán mò — thì bạn đã vượt quá giới hạn khả năng con người. Đó là ngưỡng đầu tiên.
Nếu máy phanh của bạn điều chỉnh chuyển động trượt theo phản hồi tải hoặc góc, nhưng thiết bị theo dõi không nhận được cùng dữ liệu điều khiển trong cùng chu kỳ, bạn đang gặp xung đột kiến trúc. Đó là ngưỡng thứ hai.
Nếu hỗn hợp sản xuất của bạn yêu cầu thiết lập đa trạm mà chuyển động rút và thiết lập lại làm tăng thời gian chu kỳ hoặc nguy cơ va chạm có thể đo được, thì bạn đang gặp ma sát vận hành. Đó là ngưỡng thứ ba.
Vượt qua một ngưỡng, có thể việc nâng cấp vẫn hoạt động. Vượt qua hai, bạn sẽ bắt đầu thấy sai lệch góc, hư hại bề mặt hoặc thời gian chu kỳ tăng dần. Vượt qua cả ba, thì gọi bộ theo dõi đồng bộ là “xa xỉ” chẳng khác nào nói bàn chặn sau là tùy chọn.
Thùng Phế Liệu: Một xưởng uốn thép không gỉ dày 10‑gauge dài 3 mét bằng máy thủy lực 320 tấn đã thêm một bộ theo dõi tích hợp, kết nối mạng sau nhiều năm phải vật lộn với sai lệch góc ở khoảng 0,8 độ. Cùng vật liệu. Cùng dụng cụ. Sai lệch giảm xuống dưới 0,2 độ, và việc thao tác từ hai người còn lại một người. Lao động được chuyển sang công đoạn tiếp theo. Thiết bị theo dõi không thêm khả năng mới. Nó loại bỏ xung đột.
Bài học không hiển nhiên ở đây là: bạn không biện minh cho việc dùng bộ theo dõi kết nối mạng bằng trọng lượng tấm tối đa. Bạn biện minh cho nó khi hành vi vật liệu, trí tuệ máy móc và độ phức tạp sản xuất giao nhau vượt quá mức mà hỗ trợ phản ứng có thể điều chỉnh kịp thời.
Kết Luận Từ Xưởng: Khi khối lượng tấm, điều khiển trượt động, và quy trình đa trạm giao nhau, thì một bộ theo dõi tích hợp hoàn toàn không còn là tùy chọn nữa mà trở thành cấu phần cấu trúc của chính quá trình uốn.
Hãy xem công việc nặng nhất, dài nhất, phức tạp nhất được lên lịch trong quý này của bạn.
Giờ hãy hỏi: liệu hỗ trợ hiện tại của bạn đang phối hợp với trượt – hay chỉ phản ứng lại nó?


















