

10피트 브레이크, 120톤, 손가락 끝이 들어갈 정도로만 벌어진 하부 다이. 작업자는 블랭크를 정렬하고 손을 빼낸 뒤, 받침대에 설치된 쌍둥이 손바닥 버튼을 향해 손을 뻗는다. 램이 내려오고, 그는 이미 몸을 구부려 상승 행정에서 부품을 받으려 하고 있다.
그는 “규정을 준수하고 있다.”
그런데 왜 그의 감독자는 바닥에 피가 흩뿌려진 상태에서 사고 보고서를 작성하고 있을까?
2015년 이전에 지어진 어떤 작업장을 걸어가 봐도 같은 설정을 볼 수 있다. 양손 버튼 두 개가 간격을 두고 배치되어 있다. ANSI B11.3 작업자의 손이 사이클이 시작될 때 작동 지점 밖에 있도록 하기 위함이다. 이중 채널 배선. 반(反)타이다운 기능. 파란색 잉크로 서명된 분기별 테스트 로그.
서류상으로는 완벽하다.
현장에서 리듬을 지켜보라. 부품 위치 지정. 뒤로 손 뻗기. 누르기. 앞으로 한 걸음. 받치기. 재위치 설정. 다시 뒤로 손 뻗기. 다시 누르기. 모든 절곡마다 강철이 움직이기 전에 온몸을 턱에서 떼어내는 재설정이 필요하다.
그 재설정이 바로 ‘규정 준수’의 대가다. 그리고 당신은 그것을 몇 초와 피부로 지불해 왔다.
양손 제어는 위험을 제거하지 않는다. 단지 작동 순간에 거리를 강제로 만들 뿐이다. 램은 여전히 닫혀가는 강철 이빨 세트이며, 당신은 단지 작업자가 물리기 전에 뒤로 물러서게 배운 것뿐이다. 사이클이 시작된 후 기계는 그의 손이 어디에 있는지 모른다.
거리가 곧 보호라고 생각한다면, 이미 당신의 사고 기록을 희망에 걸고 있는 것이다—그리고 검사관은 희망에는 벌금을 부과하지 않는다. 실패에 부과한다.
나는 한 사례를 검토했다. 작업자가 두 버튼을 눌렀고, 램이 하강했으며, 펀치가 가공물에 닿자 그는 본능적으로 기울기 시작한 좁은 플랜지를 안정시키기 위해 앞으로 손을 뻗었다.
브레이크는 신경 쓰지 않았다. 이미 행정 중이었다.
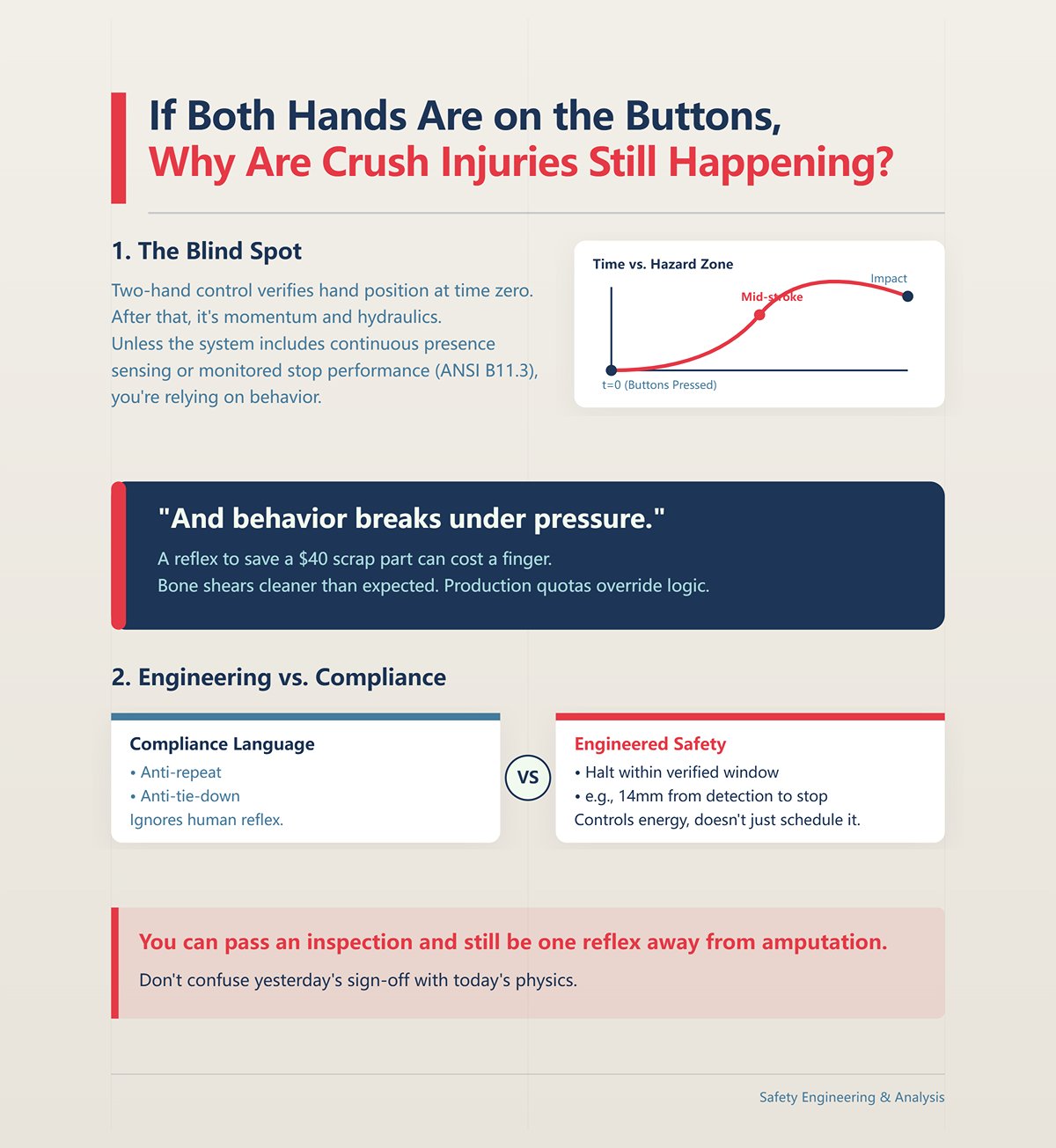
그게 바로 사각지대다. 양손 제어는 시간 제로에서 손 위치를 확인한다. 그 이후에는 관성과 유압이다. 시스템에 지속적인 존재 감지나 현재의 ANSI B11.3 기대치를 충족하는 감시된 정지 성능이 포함되어 있지 않다면, 당신은 행동에 의존하고 있는 것이다.
그리고 행동은 압박 속에서 무너진다.
20년 전 나는 한 남자가 하강 중에 미끄러지는 부품을 “살짝 밀기만” 하려다 검지 끝을 잃는 것을 봤다. 뼈는 생각보다 깔끔하게 절단된다. 그는 양손 제어를 갖추고 있었다. 그러나 그는 생산 할당량도 있었다.
규정 준수 문구는 반복 방지와 반(反)타이다운을 언급한다. 그러나 40달러어치의 스크랩을 발생시키는 삐뚤어진 절곡을 구하려는 인간의 반사신경에 대해서는 언급하지 않는다. 램이 작동을 시작하면 위험 구역은 여전히 열려 있으며, 정지 성능이 검증된 범위 내에서 멈추도록 설계되지 않았다면—즉 14mm 감지에서 정지까지—당신은 에너지를 제어하는 것이 아니라 그것을 일정표에 맞추고 있습니다.
검사를 통과할 수는 있지만, 절단까지 한 번의 반사 신경 차이밖에 나지 않을 수도 있습니다. 어제의 승인 서류를 오늘의 물리법칙과 혼동하지 마십시오. 그렇지 않으면 뒤따르는 벌금은 당신의 분기 보너스보다 더 많은 0이 붙을 것입니다.
이제 손바닥 버튼 대신 기계식 당김 장치를 사용한다고 생각해보세요—램이 내려갈 때 손목의 케이블이 후퇴하는 방식입니다. 시스템은 조정된 만큼만 후퇴하기 때문에 작업자가 케이블을 너무 꽉 조여 붉은 자국이 생기는 것을 본 적이 있습니다.

그걸 두꺼운 철판으로 8시간 동안 가동해 보십시오.
매 사이클마다: 팔을 앞으로 뻗어 위치를 잡고, 케이블에 긴장감이 걸리고, 램이 떨어질 때 어깨가 당김에 저항하고, 복귀 시 스프링 힘과 싸웁니다. 손을 금형 공간 밖에 두는 데는 도움이 되죠. 하지만 교대마다 회전근개에 수천 번 부담을 줍니다.
당신은 급성 압착 위험을 누적성 긴장으로 바꾼 셈입니다.
그리고 긴장성 손상은 절단된 손가락처럼 OSHA 300 로그에 표시되지 않습니다. 그것은 근무 손실, ’과도한 부담“으로 표시된 산재 보상 청구, 그리고 가슴 높이 이상 팔을 들 수 없는 52세 프레스 브레이크 작업자로 나타납니다. 위험은 압착 지점에서 관절로 이동한 것입니다.
안전 장치가 기계를 작업자의 몸보다 더 확실히 보호한다면, 당신은 정확히 무엇을 최적화하고 있는 걸까요?
설교하지 말고 계산해봅시다.
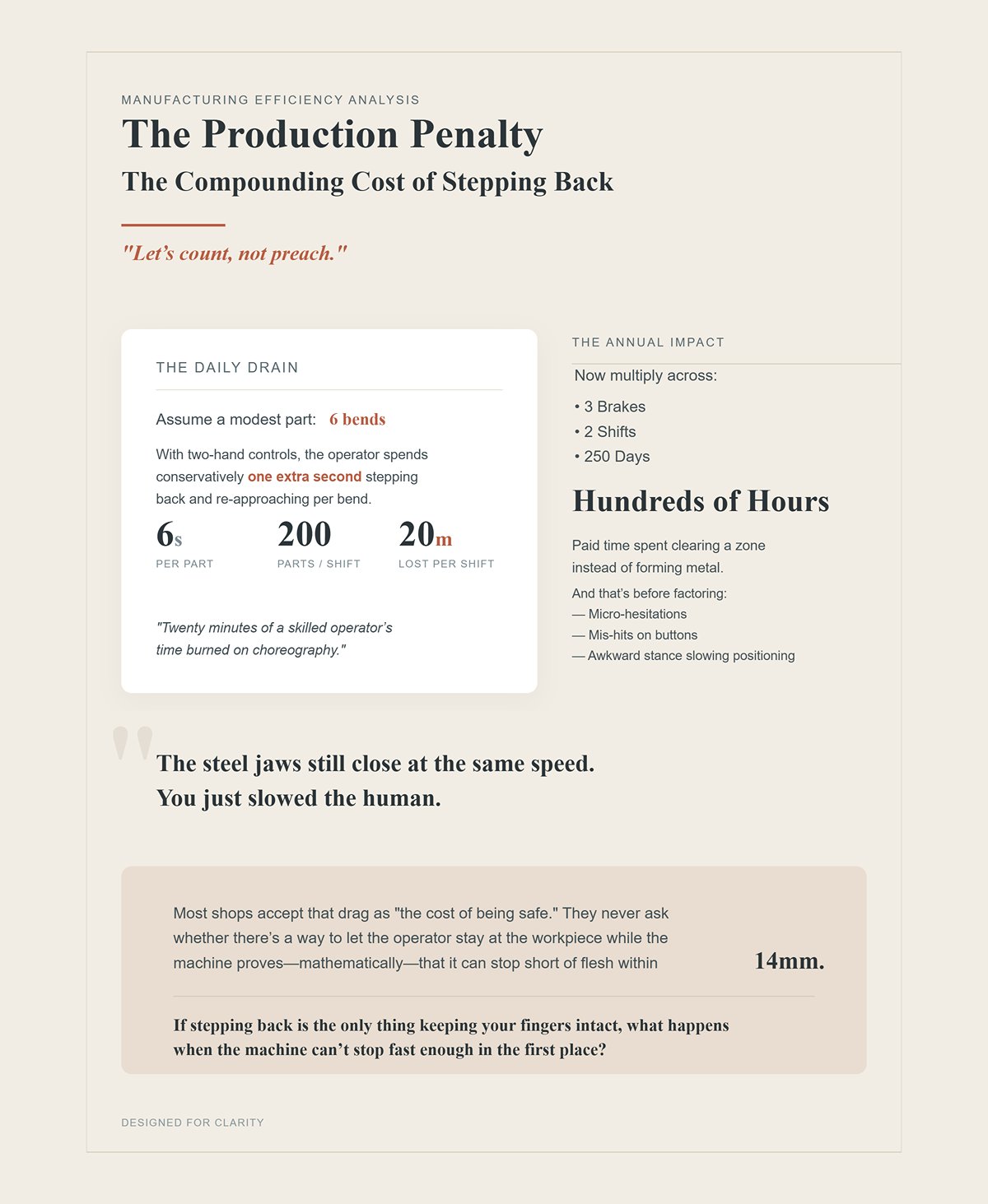
겸손한 부품을 가정합시다: 굴절 6회. 양손 제어 시, 작업자는—보수적으로 추산해—각 굴절마다 뒤로 한 걸음 물러나 다시 접근하는 데 1초를 소비합니다. 부품당 6초입니다. 교대당 200개이면, 1,200초입니다. 20분입니다.
숙련된 작업자의 20분이 동작 반복에 소모됩니다.
이제 프레스 브레이크 3대, 2교대, 250일을 곱해보십시오. 연간 수백 시간이 됩니다—금속을 형성하기보다는 구역을 비우는 데 쓰이는 급여 시간입니다. 그리고 미세한 망설임, 버튼 오작동, 위치 잡기를 늦추는 어색한 자세는 아직 고려하지도 않았습니다.
철제 턱은 여전히 같은 속도로 닫힙니다. 당신은 단지 인간을 느리게 만들었습니다.
대부분의 작업장은 그 지연을 “안전을 위한 비용”으로 받아들입니다. 그들은 작업자가 공작물 옆에 그대로 있으면서도 기계가—수학적으로—살에 닿기 전에 멈출 수 있음을 입증할 방법이 있는지 묻지 않습니다. 14mm.
만약 뒤로 물러서는 것이 손가락을 지키는 유일한 수단이라면, 애초에 기계가 충분히 빨리 멈추지 못하면 어떤 일이 생길까요?
당신은 프레스 브레이크 앞에 서서, 36인치 플랜지를 두 손으로 잡고, 펀치 끝을 주시하고 있습니다. 램은 생산 속도로 내려오고 있습니다—10mm/s를 훨씬 넘어서는 속도로. 10mm/s. 당신의 직감은 이렇게 말합니다. 무언가 잘못되면, 안전 시스템이 그것을 멈출 것이다.
진짜로 중요한 질문은 이것입니다. 멈출 수 있는가? 14mm 당신의 손가락이 있을 법한 위치 안에서?
“버튼이 두 개 있는가”도 아니고 “레이저가 있는가”도 아니며 “판매원이 규정에 맞다고 말했는가”도 아닙니다. 그런 말들 아래에서는 ANSI B11.3, 전체 위험 모델이 단 하나의 냉혹한 측정으로 압축됩니다 — 위험이 감지된 순간부터 움직임이 완전히 멈출 때까지 램이 이동하는 거리. 그 거리가 14mm 생산 속도에서 기준을 초과한다면, 당신에게 있는 것은 근접‑보호가 아니라 연극입니다.
그리고 연극은 철을 늦추지 못합니다.
프레스 브레이크는 닫혀 가는 턱 세트입니다. 양손 조작 장치는 물림 이전에 당신을 이빨에서 한 발자국 물러서게 합니다. AOPD — 능동 광전자 보호장치는 턱이 멈추기 전에 물림을 시간을 맞추려 합니다. 그러나 머신의 정지 성능이 물리적으로 그 14mm 시간 창을 충족시키지 못한다면, 그 어떤 것도 중요하지 않습니다.
그래서 어떤 안전장치가 가장 좋은지를 묻기 전에 더 어려운 질문을 하십시오. 현재 하중 상태에서 측정된 실제 정지 거리는 얼마입니까?
OSHA는 당신이 무엇을 설치했는지에는 관심 없습니다. 그들은 정지 시간과 안전 거리 간의 관계에 관심을 가집니다. 29 CFR 1910 서브파트 O에 따르면 그 관계는 의견이 아닌 산수입니다.
현장에서 그것이 어떻게 작동하는지 보겠습니다.
당신의 브레이크가 10mm/s, ANSI B11.3 보다 빠르게 작동한다면 “안전 속도”만으로 의존하는 것은 허용되지 않습니다. 그 속도에서는 존재 감지 장치가 침입을 감지하고 검증된 거리 내에서 램을 멈추지 않는 한, 작업자가 램이 감속하기 전에 다이 공간에 손을 뻗을 수 있습니다. 다시 말하자면, 14mm 는 근접형 AOPD 시스템의 중요한 기준 임계값으로 생각해야 합니다.
이제 핀치 포인트로부터 200mm 떨어진 곳에 설치된 라이트 커튼을 떠올려보십시오. 측정된 정지 거리가 120mm라면, 서류상으로는 괜찮습니다. 그러나 작업자가 그 커튼과 다이 사이에서 감지되지 않은 채 설 수 있다면, 기하학적 블라인드 스팟을 만든 것입니다. 해당 상황에서는 표준이 명확히 추가 보호를 요구합니다. 감지가 없는 거리는 손이 들어갈 만큼 큰 허점입니다.
따라서 진짜 변수는 장치가 아닙니다. 그것은 다음과 같습니다:
정지 시간 × 접근 속도 = 최소 안전 거리.
특정 브레이크, 유압 상태, 생산 속도에 맞춰 이를 계산해본 적이 없다면, 당신은 추측하고 있는 것입니다. 그리고 OSHA 준수 담당자 앞에서의 추측은 곧 위반으로 이어집니다. 그들은 센서 브랜드에 벌금을 부과하지 않습니다. 검증되지 않은 정지 성능에 벌금을 부과합니다.
| 주제 | 세부 사항 |
|---|---|
| 규제 근거 | OSHA는 정지 시간과 안전 거리 간의 관계를 기준으로 준수 여부를 평가합니다. 29 CFR 1910 Subpart O. 이 관계는 의견이 아닌 산술적 관계입니다. |
| 안전 속도 제한 | 브레이크 속도가 10 mm/s, 를 초과하면, ANSI B11.3은 “안전 속도”만으로 신뢰하는 것을 허용하지 않습니다. |
| 고속 시 위험 | 속도가 10 mm/s를 초과하면, 존재 감지 장치가 침입을 탐지하고 검증된 거리 내에서 램을 정지시키지 않는 한 작업자가 램이 감속하기 전에 다이 공간에 도달할 수 있습니다 (예:, 근접형 AOPD 시스템의 14 mm 임계값). |
| 라이트 커튼 예시 | 라이트 커튼이 200 mm 의 핀치 포인트로부터 설치되고, 측정된 정지 거리가 120 mm 인 경우 문서상으로는 준수 상태로 보입니다. |
| 기하학적 사각지대 위험 | 만약 작업자가 커튼과 다이 사이에 눈에 띄지 않고 설 수 있다면, 사각지대가 존재하는 것입니다. 이런 경우 표준에서는 추가적인 보호를 요구합니다. 감지되지 않은 거리는 심각한 위험을 초래합니다. |
| 핵심 공식 | 정지 시간 × 접근 속도 = 최소 안전 거리 |
| 규정 준수 위험 | 특정 브레이크, 유압 상태, 생산 속도에 대해 정지 거리를 계산하지 않았다면, 규정 준수는 추측에 기반하게 됩니다. OSHA는 검증되지 않은 정지 성능을 문제 삼으며—센서 브랜드는 중요하지 않습니다. |
이제 구체적으로 살펴봅시다.
오버런 테스트는 정지 신호가 시작된 후 램이 얼마나 이동하는지를 측정합니다. 얼마나 빨리 멈춰야 하는지가 아니라, 실제로 얼마나 빨리 멈추는지를 측정하는 것입니다. 하중 상태에서, 온도 하에서, 그 기계에서.
램을 정상 접근 속도로 작동시킵니다. 제어 시스템이나 AOPD 테스트 기능을 통해 정지를 트리거합니다. 신호에서 완전 정지까지의 거리를 측정합니다. 그 숫자가 진실입니다.
저는 “AOPD 준비 완료”라고 광고된 브레이크가 추운 아침에는 22mm, 점심 이후 기름이 묽어졌을 때는 18mm를 초과한 것을 본 적이 있습니다. 두 숫자 모두 초과. 14mm. 두 숫자 모두 해당 기계를 진정한 근접 안전 보호에서 탈락시키는 수치입니다. ANSI B11.3 그리고 중요한 점: OSHA 지침은 각 스트로크마다 정지 성능의 편차를 모니터링할 것을 요구합니다. 1년에 한 번이 아닌, “정비가 시간이 날 때”가 아닌, 매번입니다. 정지 시간이 변화하는데 이를 잡지 못하면, 계산된 안전 거리는 허구가 됩니다.
허구는 비용이 큽니다. 검사관은 여러분의 의도에 대해 논쟁하지 않고, 숫자를 측정합니다.
그래서 제가 어떤 작업장에 “우리는 레이저를 설치했으니 안전하다”는 말을 들으면, 제 첫 질문은 단순합니다: 마지막으로 기록된 정지 거리 테스트를 보여달라. 못 보여주면 안전에 대한 이야기는 30초 만에 무너집니다.
살에 닿기 전에 램이 멈춘다는 것을.
증명할 수 없다면, 여러분은 설계된 안전을 갖춘 것이 아니라, 배선과 함께한 낙관주의를 가지고 있는 것입니다. 14mm, 숨겨진 취약점: 느린 유압 밸브가 첨단 센서를 쓸모 없게 만드는 이유.
AOPD는 매우 솔직한 장치입니다. 많은 시스템이.
AOPDs are brutally honest devices. Many systems built to ANSI B11.3 레이저가 고장 나면 브레이크가 최고 속도로 사이클을 돌지 못하게 합니다. 일부는 아예 작동하지 않습니다. 이것은 설계 결함이 아니라 표준이 요구하는 선택입니다: 보호 장치를 고치거나 생산을 멈추거나.
이제 여기서 작업장이 피해를 입는 지점이 있습니다.
낡은 비례 밸브, 끈적이는 스풀, 반응이 미미한 펌프를 가진 20년 된 유압 시스템에 최신 AOPD를 달아버리는 것입니다. 센서는 수 밀리초 안에 침입을 감지합니다. 제어 장치는 즉시 정지 명령을 보냅니다. 밸브는 머뭇거립니다. 압력이 천천히 빠져나갑니다. 램이 관성으로 움직입니다.
감지는 빠릅니다. 감속은 그렇지 않습니다.
유압 회로가 압력을 덤프하고 유량을 빠르게 차단할 수 없으면 14mm 정지 시간 내에 가장 정교한 센서도 여러분을 구할 수 없습니다. 그것은 실패의 목격자가 됩니다.
제가 감사한 기계 중에는 정지 거리가 허용된 시간보다 길어서 근접 AOPD 인증이 기계적으로 불가능한 경우가 있었습니다. 표준은 명확합니다: 그 거리를 안정적으로 멈출 수 없는 브레이크는 해당 보호 방식을 장착할 만큼 제대로 기능하고 있지 않습니다. 느린 오일은 소프트웨어로 해결할 수 없습니다.
그래서 현실 점검이 필요합니다.
레이저 예산을 책정하기 전에, 작업자에게 후퇴하지 않고 작업물에 머물 수 있다고 약속하기 전에, 기계를 테스트하십시오. 정지 거리를 확인하십시오. 밸브 응답 시간, 유압 압력 감소, 제어 지연을 시스템 전체로 평가하십시오.
왜냐하면 램이 시간 내에 멈추지 못한다면 14mm, 세상 모든 다른 안전 장치는 단지 보여주기일 뿐이며—뒤따르는 벌금은 브로셔에서 센서가 얼마나 첨단으로 보였는지에 전혀 신경 쓰지 않을 것입니다.
예를 들어 여러분의 1992년 유압 브레이크가 18mm 점심 이후에 초과하고 22mm 냉각 시작 시 초과한다고 가정해봅시다. 테스트를 했습니다. 수치가 나왔습니다. 거의 14mm 닿을 듯 하지만 — 그리고 여전히 ANSI B11.3.
근접 보호 표준의 허용 범위 밖에 있습니다.
그렇다면 여러분의 선택지는 무엇일까요? 14mm, 당신에게는 세 가지 솔직한 선택지가 있습니다. 첫째: 유압 응답을 재구성 — 밸브, 씰, 압력 감소, 제어 지연 — 하여 정지 시간이 기준을 충족하도록 하는 것. 둘째: 존재 감지 장치를 금형에서 더 떨어진 곳으로 이동시켜 실제 정지 거리와 맞추는 것, 이는 안전 거리를 늘리고 작업자를 뒤로 물러나게 합니다. 셋째: 양손 제어 또는 주변 가드를 선택하여 생산 손실을 감수하는 것.
그게 다입니다. 네 번째 선택은 없습니다.
하지만 기계가 입증할 수 있는 정지 요구 사항을 충족할 때 — 검증되고, 문서화되며, 매 스트로크마다 모니터링 — 그때 능동 광전자 장치(AOPD)가 제 역할을 합니다. 양손 제어는 작업자가 강철 턱에서 떨어지도록 강제하지만, AOPD는 램이 내려오는 동안 실제 위험 지점을 보호하다가 무음(mute) 지점에 도달하면 멈춥니다. 위험이 있는 곳에 보호가 있습니다.
그리고 그것이 전환점입니다.
양손 제어는 움직임 시작을 보호합니다. AOPD는 위험한 움직임을 보호합니다.
안전 장치가 기계를 작업자의 몸보다 더 확실히 보호한다면, 당신은 정확히 무엇을 최적화하고 있는 걸까요?
길이 10피트 브레이크가 얕은 팬을 굽는 장면을 상상해 보세요. 표준 광커튼은 금형 공간에서 200mm 떨어진 곳에 설치되어, 정지 시간에 기반한 계산된 안전 거리를 만족시킵니다. 작업자가 블랭크를 로드하고, 램이 내려오기 시작하며, 스트로크 중간에 리턴 플랜지가 빔을 끊습니다.
정지. 리셋. 다시 사이클.
그게 모두가 불평하는 불필요한 오작동입니다.
문제는 커튼이 아니라 기하학입니다.
전통적인 광커튼은 수직 감지벽을 만듭니다. 그 벽에 들어오는 모든 것은 스트로크를 멈춥니다. 이는 전체 위험 구역에서 모든 인원을 완전히 배제 하려는 경우 이상적입니다 — 특히 큰 부품이나 공유 작업 공간에서. 그러나 박스 벤딩이나 플랜지 작업 중에는 부품 자체가 침입자가 됩니다.
근접 레이저 AOPD 시스템은 다르게 작동합니다. 이들은 금형 개구부 바로 위 몇 밀리미터에 좁은 감지 필드를 투사하고, 램과 함께 프로그램된 무음 지점까지 이동합니다. 200mm 떨어진 빈 공간을 보호하는 대신, 이들은 직접 핀치 포인트를 보호하며, 무음 깊이 도달 전에 그 구역에 무엇이든 들어오면 램을 멈춥니다.
커튼과 금형 사이의 사각지대 없음. 물러서지 않아도 됨. 부품 기하학으로 인한 스트로크 중간 빔 끊김 없음.
현대 시스템은 심지어 모드 전환이 가능합니다 — 박스 벤딩에는 레이저, 긴 금형이나 전체 높이 보호에는 광커튼 — HMI를 통해, 양쪽 모두 정지 시간 모니터링이 활성화된 상태에서. 이 하이브리드 접근은 오래된 ‘둘 중 하나’ 논쟁을 없앱니다.
불필요한 오작동은 광커튼이 쓸모없다는 증거가 아니었습니다. 그것은 거리 기반 보호와 작업 지점 보호가 서로 다른 문제를 해결하고 있다는 증거였습니다.
실제 정지 거리를 만족시키도록 커튼을 멀리 설치하면 근접성을 잃습니다. 정지 시간을 충족시키지 않고 가까이 설치하면 규정 준수성을 잃습니다.
그리고 안전 거리 계산이 문서화된 정지 성능과 맞지 않으면, 당신은 검사관에게 당신 이름이 새겨진 위반 티켓을 건네주는 셈입니다.
이제 작업장에서 가장 많이 망치는 부분으로 들어가 보자.
박스 굽힘 중에는 플랜지가 감지 영역에 들어가야 한다. 금속이 빔을 지날 때마다 시스템이 멈춘다면 부품을 완성할 수 없을 것이다. 그래서 우리는 뮤팅을 사용한다 — 스트로크의 특정 지점에서 AOPD가 재료 진입을 허용하는데, 그 이유는 남은 간격이 검증된 안전 거리보다 작기 때문이다.
뮤팅이 제대로 수행되면 측정된 정지 거리와 직접 연결된다. 검증된 오버런이 13mm, 인 경우, 뮤트 지점은 램이 완전 정지 전에 그 남은 거리 이상 이동하지 못하도록 설정된다.
대충 처리하면 작업자들이 편의를 위해 영역을 “블랭크 처리”하거나 장치를 억제해 버린다.
전면 억제는 생산적인 것처럼 느껴진다. 누군가가 그 보호되지 않은 시간에 손을 뻗기 전까지는 말이다.
법적으로, 뮤팅은 해당 기계의 정지 성능에 맞춰 제어되고 문서화되어야 한다. 많은 현대식 AOPD는 매 스트로크마다 정지 시간을 모니터링하며 허용 오차를 초과하면 기계를 잠근다. 그것은 시스템이 까다로운 것이 아니다. 뮤트 계산이 허구가 되는 것을 막는 것이다. ANSI B11.3, 생산 중단을 유발하는 귀찮은 잠금 때문에 정지 시간 모니터링을 꺼버린 작업장을 봤다. 그들은 여전히 “레이저를 돌리고 있었다.”.
그들의 검사 보고서가 기록된 정지 데이터를 29 CFR 1910 Subpart O의 요구 안전 거리 공식과 비교하기 전까지는 말이다.“
그는 “규정을 준수하고 있다.”
물리학을 뮤트할 수는 없다. 그리고 자를 들고 있는 준수 담당자와 당신의 유지보수 로그 앞에서 산수와 논쟁할 수도 없다.
사이클 타임 현실: AOPD로 전환할 때 작업자들이 예상하지 못하는 출력 수치.
양손 제어 셋업에서는 숙련된 작업자가 작은 브래킷 200개를 작업하는 모습을 보라. 손을 부품에서 뗀다. 버튼을 누른다. 하강을 기다린다. 손을 다시 가져와 위치를 잡는다.
그 미세한 시퀀스는 작업물에 계속 붙어 있을 때보다 한 사이클당 약 0.5초 더 걸린다.
0.5초는 사소해 보일 수 있다. 하지만 200개 부품이면 100초다. 1,000개 부품이면 8분이 넘는다. 게다가 미세한 머뭇거림, 버튼 오타, 자세 불편으로 인한 위치 조정 지연은 계산에 포함되지 않았다.
근접 AOPD에서는 작업자의 손이 선택하지 않는 한 부품에서 떨어지지 않는다. 램은 정상 속도로 하강하고 보호 기능은 뮤팅 시점까지 활성 상태다. 뒤로 물러날 필요도, 버튼을 누를 필요도 없다. 단순히 적재하고, 맞추고, 사이클을 돌리고, 반복하면 된다.
작업장은 안전이 시간을 소모한다고 예상한다. 하지만 양손 제어에서 올바르게 구성된 AOPD로 전환하면 브레이크가 자격 요건을 충족하는 범위 내에서.
Shops expect safety to cost time. When they switch from two‑hand control to properly configured AOPD on a brake that qualifies within 14mm, 그들은 종종 작업자의 동작이 짧아졌기 때문에 동일하거나 더 빠른 사이클 시간을 보고 놀랍니다.
짧은 동작. 피로 감소. 미세한 지연 감소.
하지만 이것은 기계의 정지 성능이 실제로 안정적일 때만 적용됩니다. 유압 지연 때문에 보호 장치를 더 멀리 설치해야 한다면, 다시 작업 구역 밖으로 나가게 되어 그 효율성이 사라집니다.
그래서 여기 명확한 경계가 있습니다.
브레이크가 신뢰할 수 있게 정지되지 않는다면 14mm, 유압을 수정하거나, 근접도가 감소한 상태로 안전 거리를 늘리거나, 아니면 양손 제어로 느린 생산 속도를 유지해야 합니다. AOPD는 마법이 아닙니다. 그것은 오일과 강철 위에서 작동하는 수학입니다.
그리고 문서화된 정지 데이터를 뒷받침하지 않고 근접 보호를 주장한다면, 생산성 향상은 벌금이 책상 위에 떨어질 때 아무 의미가 없게 됩니다.
지난 가을, 나는 OSHA 규정 준수 담당관이 바인더를 뒤적이며 세 가지를 물어보는 동안 10피트 프레스 브레이크 옆에 서 있었습니다: 최신 정지 시간 시험 결과, 이에 따른 위험 평가 증거 ANSI B11.3, 그리고 정지 시간 모니터가 우회되지 않았음을 보여주는 기록이었습니다. 작업장은 램에 레이저를 장착해 두었습니다. 소유자는 “우린 괜찮아요.”라고 계속 말했습니다.”
검사관은 하드웨어에는 관심이 없었습니다. 그는 숫자에 관심이 있었습니다.
그는 전체 작동 온도에서 밀리미터 단위로 문서화된 초과 이동 거리, 시스템이 14mm 내에서 최악의 하중에서도 정지했는지 확인, 그리고 음소거 지점이 추측이 아닌 그 데이터로 계산되었는지에 대한 증거를 원했습니다. 그는 기록된 정지 거리와 설정된 음소거 깊이를 비교했습니다. 그런 다음, 성능이 변동되지 않았음을 증명하는 유지 보수 로그를 요청했습니다.
그것이 실제 현장에서 “검사 준비 완료” 상태가 의미하는 것입니다: 측정된 정지 거리(냉간 및 온간), 계산된 안전 거리, 연결된 음소거 논리, 자동 정지 시간 모니터링 활성화, 그리고 ANSI B11.3 및 B11.0 방법론을 참조한 위험 평가가 파일에 들어 있는 상태. 스티커가 아닙니다. 판매 브로셔도 아닙니다. 당신이 변호할 수 있는 산술입니다.
그리고 당신의 서류에 14mm 라고 되어 있는데 마지막으로 검증된 정지가 18이었다면, 그 벌금은 이자가 붙어서 올 것입니다.
이제 수학이 현실과 만나는 지점을 이야기해 봅시다.
네 면이 있는 상자를 상상해 보세요. 모든 면에 3인치 플랜지가 있습니다. 세 번째 절곡 시, 그 플랜지들이 뿔처럼 위로 솟아 있습니다. 램이 내려오면, 부품 자체가 감지 필드 안으로 들어옵니다. 전통적인 라이트 커튼을 2피트 떨어진 곳에 설치한 경우, 단순히 부품을 완성하기 위해 좌우 영역을 차단해야 합니다.
블랭킹(Blanking) 자체가 나쁜 것은 아니다. 생각 없이 하는 블랭킹이 문제다.
법적으로, 뮤팅은 해당 기계의 정지 성능에 맞춰 제어되고 문서화되어야 한다. 많은 현대식 AOPD는 매 스트로크마다 정지 시간을 모니터링하며 허용 오차를 초과하면 기계를 잠근다. 그것은 시스템이 까다로운 것이 아니다. 뮤트 계산이 허구가 되는 것을 막는 것이다. ANSI B11.3, 근접 AOPD는 문서화된 위험 평가 후에만 허용된다. 그 평가에는 부품 형상, 공구 높이, 작업자의 손이 닿는 거리, 그리고 기계의 검증된 정지 성능이 고려되어야 한다. 만약 플랜지가 음소거되기 전에 작업자의 손을 14mm 정지 창(stopping window) 안으로 밀어 넣게 된다면, 공정을 조정하거나 모드를 변경해야 한다.
현대 시스템은 HMI를 통해 레이저와 커튼 모드 간 전환을 가능하게 하며, 두 모드 모두 정지 시간 모니터링이 활성화되어 있다. 이러한 하이브리드 구성은 일반적인 성형 작업의 약 95% 정도를 처리할 수 있다. 남은 5%—좁은 상자, 높은 공구, 어색한 재가공 부위—는 숙련도가 요구된다. 경우에 따라서는 스트로크의 일부에서 안전 속도 모드를 사용하는 것을 의미하기도 하고, 경우에 따라서는 완전 속도 작업 중 손이 닿지 않도록 절곡 순서를 재배치해야 함을 의미하기도 한다.
결코 의미해서는 안 되는 것은 “부품이 자꾸 센서를 건드려서” 장치를 비활성화하는 것이다.”
한번은 젊은 작업자가 부분 음소거된 영역 주위를 돌아 상자의 벽을 안정시키려 한 것을 본 적이 있다. 유압이 차가운 아침이라 예상보다 피스톤이 더 많이 내려갔다. 그는 집게손가락 끝을 잃었다. 깔끔하게 잘린 절단. 소란도 없었다. 단지 서류상 가정보다 몇 밀리미터 더 닫힌 강철 조가지만 있었을 뿐이다.
생산 일정과는 논쟁할 수 있다. 그러나 오일 점도와 중력과는 논쟁할 수 없다.
당신의 위험 평가가 복잡한 형상에 대해 명시적으로 다루지 않는다면, 검사관이 그렇게 할 것이고 그 대가를 적절히 청구할 것이다.
이제 폭이 2인치인 부품을 잡아보자. 작업자의 손끝은 정렬 중 금형 개구부에서 자연스럽게 1인치 이내에 위치하게 된다. 완전 접근 속도에서는, 당신의 유일한 보호는 AOPD가 침입을 감지하고 피스톤이 이동하기 전에 정지를 명령할 수 있는 능력이다. 14mm.
이는 유압 장치가 즉각적이고 반복적으로 반응한다는 가정하에 성립된다.
구형 프레스 브레이크에서는 밸브 응답 시간이 정지 신호와 기계적 정지 사이에 측정 가능한 간극을 만든다. 따뜻할 때는 규격을 만족하지만, 추울 때는 몇 밀리미터를 초과하는 기계를 기록한 적이 있다. 이러한 편차는 두 가지 선택지를 강요한다. 안전 거리를 늘려 근접성을 잃거나, 전체 스트로크 동안 램 속도를 ≤10mm/s로 제한하는 것이다.
초당 10밀리미터.
그 속도에서는 양수 버튼 제어보다 처리량의 이점이 사라진다. 사이클 타임이 늘어나고, 작업자는 조급해진다. 경영진은 “더 빠르다던” 레이저 브레이크가 왜 느린지 묻기 시작한다.
그 이유는 물리 법칙이 한계를 정하기 때문이다.
안전 속도 모드는 존재 이유가 있다. 검증된 상태에서 AOPD를 활성화한 채로 접근 시에는 최대 속도를 사용하라. 손이 가까이 있어야 하고 형상이 신뢰할 수 있는 음소거 분리를 허용하지 않을 경우, 안전 속도로 전환하라. 이를 프로그래밍하고, 문서화하며, 훈련해야 한다.
안전 장치가 기계를 작업자의 몸보다 더 확실히 보호한다면, 당신은 정확히 무엇을 최적화하고 있는 걸까요?
검증된 정지 데이터를 확보하지 않고 소형 부품을 최대 속도에서 가공하면, 단지 손가락을 위험에 빠뜨리는 것이 아니라, 램의 최대 속도를 명시한 벌금 통지를 받을 위험을 감수하는 것이다.
대부분의 공장에서 안전과 생산성을 모두 잃는 이유가 바로 여기에 있다. 그들은 AOPD를 설치하고는 잊어버린다.
레이저 렌즈에는 오일 미스트가 쌓인다. 금형 교체 중 장착 브라켓이 부딪혀 위치가 바뀐다. 배선 하니스가 느슨해진다. 시스템은 여전히 전원이 켜지고, 표시등은 녹색으로 유지된다. 하지만 정렬은 한 번에 1밀리미터씩 어긋나기 시작한다.
현대 AOPD는 통합된 정지 시간 모니터링 기능을 통해 편차를 감지하고, 안전 속도로 전환하거나 기계를 잠금 상태로 만듭니다. 작업자는 그것을 싫어합니다. 감독자는 그보다 더 싫어합니다. 그래서 누군가는 모니터링을 “일시적으로” 비활성화합니다.”
그는 “규정을 준수하고 있다.”
오염으로 인해 간헐적인 감지 오류가 발생하고 기계가 매번 ≤10mm/s로 되돌아가는 날까지 그렇게 됩니다. 생산은 급감합니다. 더 나쁜 경우에는 빔의 기하 구조가 보정된 허용 오차를 벗어나 손을 감지하지 못한 채 고속으로 접근할 수도 있습니다.
매일 시각적 검사. 매주 청소. 전체 부하 조건에서 분기별 정지 시간 검증 문서화. 연간 위험 평가 검토. 이는 관료적 조치가 아니라 다음을 지키기 위한 것입니다. 14mm 약속을 이론이 아닌 현실로 만드는 것입니다.
보호와 생산성을 동시에 잃는 가장 빠른 방법은, 사양을 충족하지 못하는 밸브나 6개월째 닦지 않은 렌즈를 무시하면서 센서가 모든 걸 구해줄 거라 가정하는 것입니다.
그런 기본 규율을 건너뛰면, 다음에 당신의 정지 거리를 계산하는 사람은 배지를 달고, 달러 기호로 시작하는 숫자를 적게 될 것입니다.
검사 대비를 유지하는 방법은 레이저를 구매하는 것이 아닙니다. 검사 대비 상태를 유지하려면, 실제로 프레스가 정지 시간 내에 멈춘다는 것을 요구 시점에 입증할 수 있는 제어 시스템을 구축해야 합니다. 14mm 실제 생산 조건에서 말입니다.
대부분의 작업장은 그 전환점을 놓칩니다. AOPD를 생산성 업그레이드로 취급하고, 규정을 준수한다는 것은 선반 위의 바인더로 생각합니다. 하지만 다음과 같은 상황에서는 ANSI B11.3, 두 가지가 같은 의미입니다. 보호 장치가 제어 신뢰성 있고, 검증되며, 첫 생산 런 전에 문서화되지 않았다면 규정을 준수하는 것이 아니라 단순히 운이 좋은 것입니다. 그리고 운은 감시관이 전체 하중 조건에서 마지막 정지 시간 검증 결과를 요구하는 날 끝납니다.
그러므로 질문은 “레이저가 있습니까?”가 아닙니다.”
“감지와 정지 사이의 램 이동 거리의 모든 밀리미터를 방어할 수 있습니까?”입니다.”
“제어 신뢰성”이란 단일 고장이 안전 기능 상실로 이어질 수 없음을 의미합니다. 이중 채널. 모니터링 피드백. 중복 밸브. 고장이 발생하면 안전 상태로 전환하는 결함 감지. 이것이 다음의 언어입니다. ANSI B11.3 및 더 넓은 B11 계열 표준입니다.
구식 클러치 회로에 연결된 독립형 라이트 커튼은 해당되지 않습니다. 단일 솔레노이드 밸브에 연결되고 스풀 위치 모니터링이 없는 레이저도 마찬가지입니다. 밸브가 멈춰 램이 다음을 넘겨서 관성으로 계속 움직인다면 14mm, 센서는 제 역할을 했습니다. 유압 시스템이 그렇지 않았던 것입니다. 그리고 표준은 노력만으로 점수를 주지 않습니다.
통합이란 AOPD 신호가 안전 등급 제어 시스템으로 전달되어 정지 시간을 지속적 또는 정의된 간격으로 모니터링한다는 의미입니다. 이는 유압 밸브가 중복성과 자체 점검 기능을 갖추도록 설계되거나 개조되어야 함을 뜻합니다. 그리고 결함이 발생하면 안전 속도로 전환하거나 잠금 상태가 되어야 합니다—“그냥 사이클 진행”이 아니라.”
대부분의 레트로핏은 바로 그 지점에서 무너집니다. 작업장은 1992년에 설계된 제어 아키텍처에 고급 센서를 추가하고 그걸 현대적이라고 부릅니다. 그는 “규정 준수”라고 주장합니다.”
검사관이 안전 회로를 추적하고, 밸브 응답에 대한 모니터링이 없는 것을 보고, 근접 작업을 정당화하는 정지 거리를 어떻게 보장하느냐고 질문하기 전까지는 아무 문제도 없습니다. 그 순간 대화는 쉼표가 들어간 위반 통보로 바뀝니다.
안전 장치가 기계를 작업자의 몸보다 더 확실히 보호한다면, 당신은 정확히 무엇을 최적화하고 있는 걸까요?
견적서로 시작하지 않습니다. 위험 평가로 시작합니다.
구매 주문서가 책상에서 떠나기 전에 문서화해야 합니다. 기계 모델, 압력(톤수), 온·냉 상태의 정지 시간 측정값, 공구 높이, 일반적인 부품 형상, 작업자의 동작 반경, 그리고 어떤 작업이 그 14mm 적용 창에 포함되는지를요. 기계가 그 창 내에서 일관되게 정지하지 못한다면, 표준은 분명합니다. 근접형 AOPD를 장착할 정도로 충분히 제대로 작동하고 있지 않다는 것입니다.
그건 선택사항이 아닙니다. 실격 사유입니다.
이제 눈에 잘 띄지 않는 부분을 봅시다. 이 평가는 안전만큼이나 생산을 보호합니다. 어떤 작업이 하이브리드 모드—레이저와 커튼, 혹은 레이저와 안전 속도—를 필요로 하는지 매핑하면, “부품 때문에 자꾸 작동하니까 채널을 꺼버리자”라는 금요일 오후의 공황 사태를 막을 수 있습니다. 이미 어떤 5%의 작업이 대체 안전 장치를 필요로 하는지 정의하고, 그에 맞게 프로그램했기 때문입니다.
검사관은 완벽을 기대하지 않습니다. 증거를 기대합니다. 문구 ANSI B11.3 조항을 참조한 문서화된 위험 평가, 하중 상태에서의 정지 시간 시험, 작업군별 정의된 안전 모드는 여러분이 위험을 관리하고 있음을 보여줍니다. 단지 반응하는 것이 아니라는 것이죠.
그 계산 과정을 차분히 설명하십시오.
그렇지 않으면 검사관이 계산기와 벌금표를 들고 대신 해줄 것입니다.
양수 버튼 제어는 한 세대의 작업자에게 위험 지점에서 물러서서 하강 1/4인치 지점까지 버튼을 누르고 있도록 훈련시켰습니다. 그것은 단순한 방법이 아니라 근육 기억입니다. 근접형 AOPD와 풋 스위치 조작으로 전환할 때, 작업자에게는 움직이는 강철 근처에서 부품을 붙잡고 정지 타이밍을 믿으라는 요청이 되는 셈입니다.
신뢰는 매뉴얼에서 얻는 것이 아닙니다. 시연에서 생깁니다.
측정된 정지 거리를 보여줍니다. 그리고 그것이 14mm 물리적 공간에서 무엇을 의미하는지—새끼손가락 두께보다 짧다는 것을—설명합니다. 고장 조건도 시연합니다. 빔을 차단하면, 기계가 안전 속도로 전환되는 것을 보여줍니다. 밸브 고장을 시뮬레이션하여 잠금이 작동하는 것도 시연합니다. 이제 시스템은 마법이 아니라 예측 가능한 것이 됩니다.
그것은 미세한 주저함, 버튼을 잘못 누르기, 자세 불균형으로 인한 위치 지연을 고려하기 전 이야기입니다. 작업자가 작은 부품을 자연스럽게 안정시키고, 풋 페달로 작동을 시작하며, 정지 시간이 검증되어 있기 때문에 전체 접근 속도를 유지할 수 있다는 것을 깨닫게 되면, 생산성과 안전은 충돌하지 않습니다.
하지만 한계도 함께 교육해야 합니다. 어떤 작업이 안전 속도를 요구하는지, 어떤 작업이 커튼 모드로 전환해야 하는지, 어떤 경우에는 형상 때문에 근접 감지가 작동하지 않아 양수 제어로 되돌아가야 하는지를 말이죠. AOPD는 두 시스템이 모두 가능한 경우 양수 제어보다 뛰어나지만, 그것이 양수 제어를 완전히 대체하는 것은 아닙니다.
그 점을 명확히 하십시오. 그렇지 않으면 작업자는 즉흥적으로 행동할 것입니다.
그리고 즉흥 행동은 검사관이 “고의 위반”이라고 부르는 것입니다.”
여기서 내가 앞으로 유지하고 싶은 관점은 다음과 같습니다: 준수는 장치 선택이 아닙니다. 그것은 방어 가능한 물리학의 연쇄로, 제어 신뢰성에 연결되어 있으며, 생산 전에 문서화되고, 근육 기억을 재작성할 때까지 강화됩니다.
그렇게 시스템을 구축하면, 강철 턱은 느려지지 않습니다. 그것은 예측 가능해집니다. 그리고 예측 가능성은 손가락이나 벌금에 대한 위험을 감수하지 않고도 최대 속도로 운행할 수 있게 합니다.
이제 가장 오래된 브레이크를 살펴보고 스스로에게 한 가지 어려운 질문을 던져보십시오: 그것이 정말로 멈출 수 있는가? 14mm—냉각 상태에서, 하중을 싣고, 검증된 상태— 아니면 애초에 적격이 아니었던 기계에 안전 전략을 설계하고 있는 것입니까?


















