

Rem rem sepanjang 10 kaki, 120 ton, cetakan bawah terbuka cukup lebar untuk menelan ujung jari. Operator meratakan pelat kosong, menarik tangannya keluar, meraih dua tombol telapak yang dipasang di atas penyangga. Ram turun saat dia sudah membungkuk ke depan untuk menangkap bagian itu pada langkah naik.
Dia “patuh.”
Jadi mengapa mandornya mengisi laporan insiden dengan darah di lantai?
Berjalanlah di mana saja di bengkel yang dibangun sebelum tahun 2015 dan Anda akan melihat pengaturan yang sama: dua tombol telapak yang dipasang ANSI B11.3 sehingga tangan operator berada di luar titik operasi saat siklus dimulai. Pengkabelan saluran ganda. Anti‑tie‑down. Log pengujian triwulanan ditandatangani dengan tinta biru.
Di atas kertas, semuanya rapi.
Di lantai, perhatikan ritmenya. Posisikan bagian. Raih ke belakang. Tekan. Melangkah masuk. Tangkap. Posisi ulang. Raih ke belakang. Tekan lagi. Setiap tekukan memerlukan penyesuaian ulang seluruh tubuh menjauh dari rahang sebelum baja bergerak.
Penyesuaian ulang itu adalah harga kepatuhan. Dan Anda telah membayarnya dalam hitungan detik dan kulit.
Kontrol dua tangan tidak menghilangkan bahaya. Mereka hanya memaksa jarak pada saat inisiasi. Ram tetap merupakan sepasang gigi baja yang menutup; Anda hanya mengajari operator untuk melangkah mundur sebelum “gigitan.” Mesin tidak tahu di mana tangan operator berada setelah siklus dimulai.
Jika Anda berpikir jarak sama dengan perlindungan, Anda sudah mempertaruhkan catatan insiden Anda pada harapan—dan inspektur tidak memberikan denda atas harapan, mereka memberikan denda atas kegagalan.
Saya telah meninjau satu kasus di mana operator menekan kedua tombol, ram turun, dan saat punch menyentuh benda kerja, dia secara refleks meraih ke depan untuk menstabilkan flensa sempit yang mulai miring.
Rem tersebut tidak peduli. Itu sedang berada di tengah langkah.
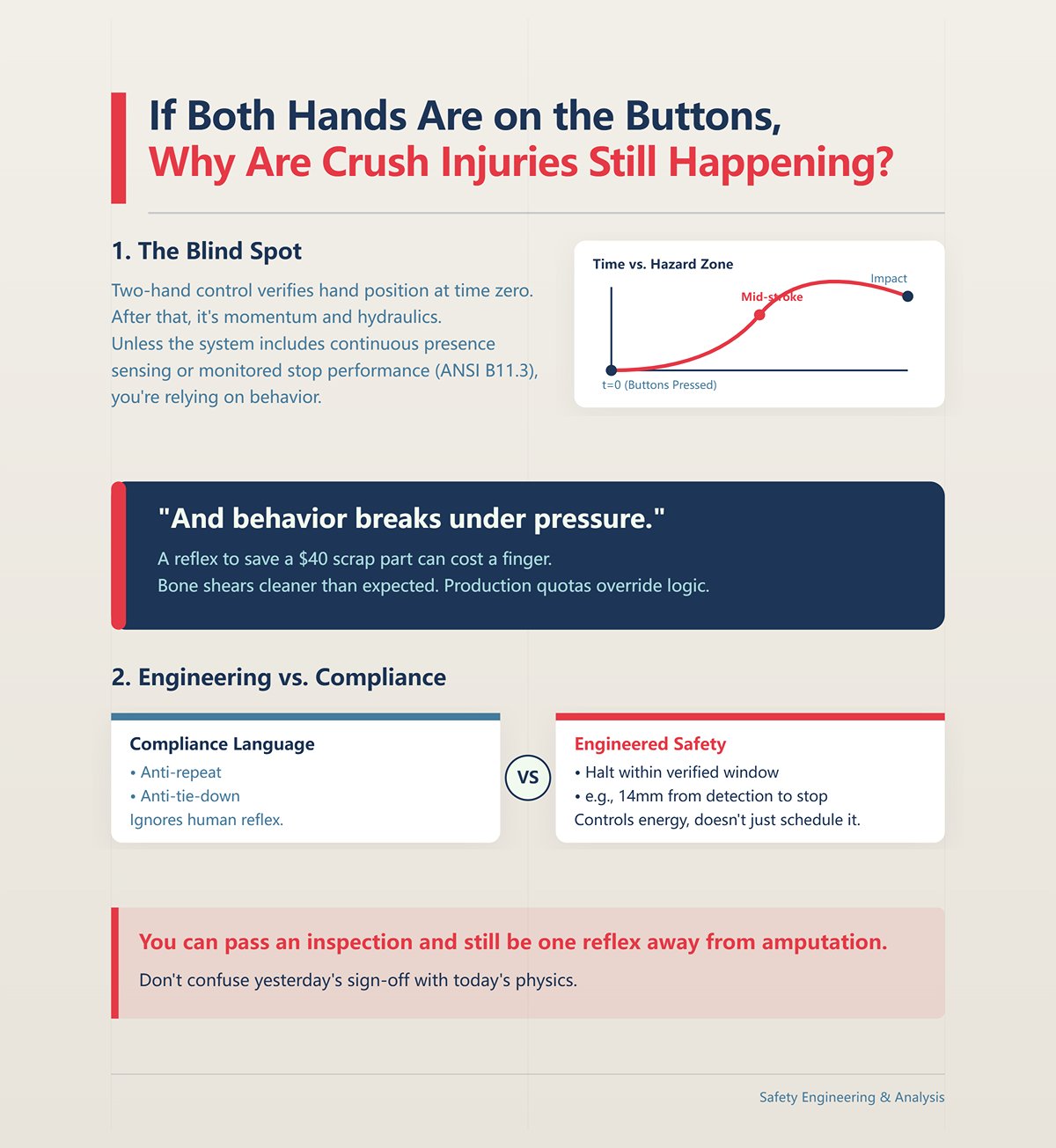
Itulah titik butanya. Kontrol dua tangan hanya memverifikasi posisi tangan pada waktu nol. Setelah itu, semuanya tentang momentum dan hidrolik. Kecuali sistem ini memiliki sensor kehadiran berkelanjutan atau pemantauan performa berhenti yang memenuhi ANSI B11.3 harapan saat ini, Anda bergantung pada perilaku.
Dan perilaku mudah runtuh di bawah tekanan.
Dua puluh tahun lalu saya melihat seorang pria kehilangan ujung jari telunjuknya karena dia mencoba “sedikit mendorong” bagian yang tergelincir saat turun. Tulang terpotong lebih bersih daripada yang Anda kira. Dia punya kontrol dua tangan. Dia juga punya target produksi.
Bahasa kepatuhan membahas tentang anti‑ulang dan anti‑tie‑down. Tapi tidak membahas tentang refleks manusia untuk menyelamatkan tekukan bengkok senilai empat puluh dolar dalam bentuk besi bekas. Zona bahaya masih terbuka begitu ram sudah berkomitmen, dan jika performa penghentian Anda tidak direkayasa untuk berhenti dalam jendela yang terverifikasi—pikirkan 14 mm dari deteksi hingga berhenti—kamu tidak sedang mengendalikan energi, kamu sedang menjadwalkannya.
Kamu bisa lulus inspeksi dan tetap hanya satu refleks dari amputasi. Jangan samakan persetujuan kemarin dengan fisika hari ini, atau denda yang menyusul akan punya lebih banyak nol daripada bonus triwulananmu.
Sekarang tukar tombol telapak dengan sistem tarik balik mekanis—kabel di pergelangan tangan yang menarik saat ram turun. Aku pernah melihat operator mengencangkannya sampai meninggalkan guratan merah karena sistem hanya menarik sejauh penyesuaiannya.

Jalankan itu selama delapan jam pada pelat berat.
Setiap siklus: lengan maju untuk menempatkan, kabel menegang, bahu menahan tarikan saat ram turun, lalu melawan gaya pegas saat kembali. Itu memang menjaga tangan tetap keluar dari ruang cetakan. Tapi juga membebani rotator cuff ribuan kali dalam satu shift.
Kamu menukar risiko cedera parah yang akut dengan ketegangan kumulatif.
Dan ketegangan tidak muncul di log OSHA 300 dengan cara yang sama seperti ujung jari yang terputus. Ia muncul sebagai waktu hilang, klaim kompensasi pekerja yang diberi label ’kelebihan tenaga,“ dan operator mesin rem berusia 52 tahun yang tidak bisa mengangkat lengannya di atas dada. Bahayanya berpindah dari titik jepit ke sendi.
Jika perangkat keselamatanmu melindungi mesin dengan lebih andal daripada tubuh operator, sebenarnya apa yang kamu optimalkan?
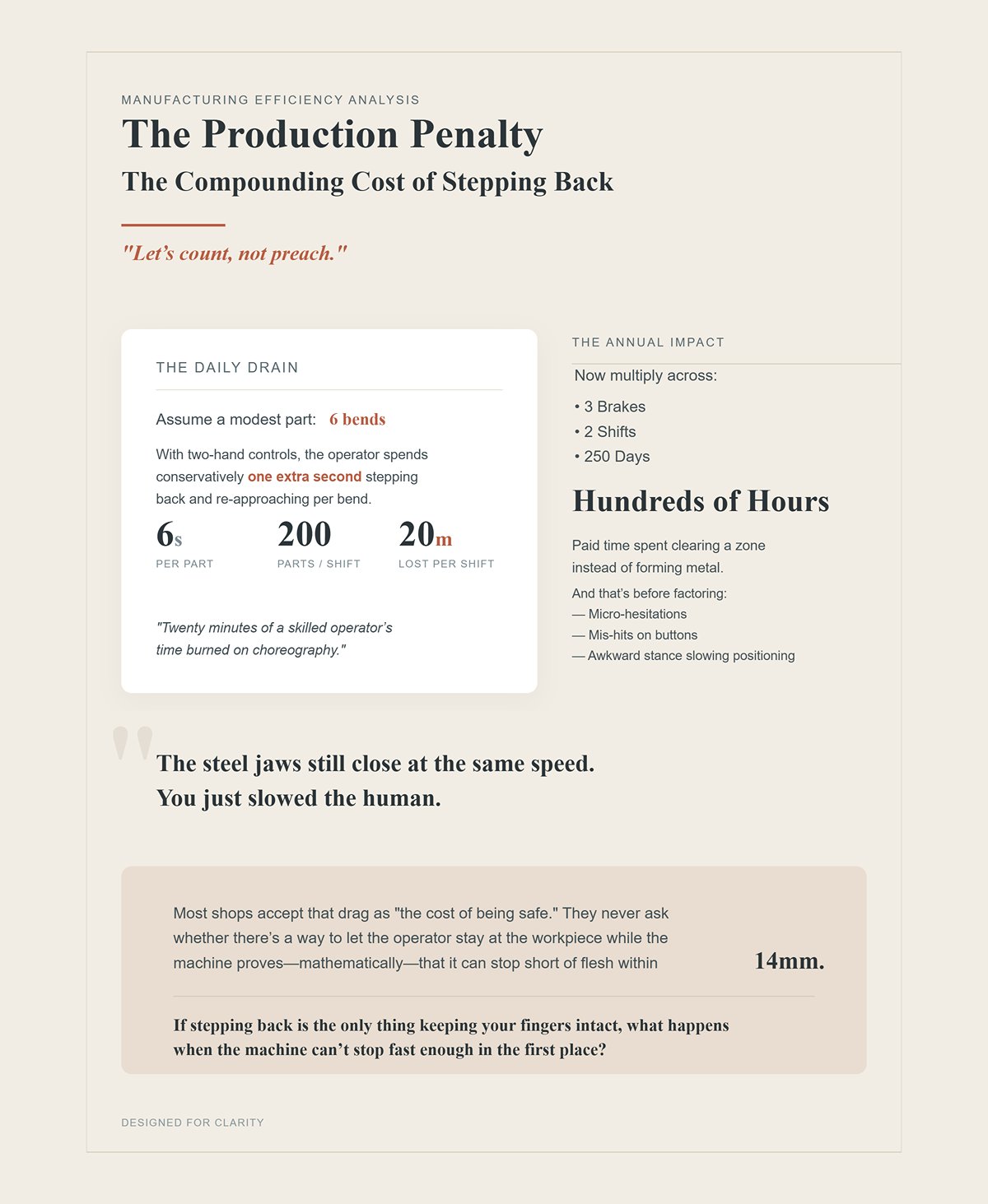
Mari kita hitung, bukan berkhotbah.
Asumsikan bagian yang sederhana: 6 lipatan. Dengan kontrol dua tangan, operator menghabiskan—secara konservatif—satu detik tambahan untuk mundur dan mendekati kembali setiap lipatan. Itu 6 detik per bagian. Pada 200 bagian per shift, itu 1.200 detik. Dua puluh menit.
Dua puluh menit waktu operator terampil yang terbakar untuk koreografi.
Sekarang kalikan di tiga mesin rem, dua shift, 250 hari. Kamu akan mencapai ratusan jam per tahun—waktu berbayar yang dihabiskan untuk mengosongkan zona alih‑alih membentuk logam. Dan itu bahkan sebelum kamu memperhitungkan mikroragu‑ragu, salah tekan tombol, posisi tubuh yang canggung yang memperlambat penempatan.
Rahang baja tetap menutup dengan kecepatan yang sama. Kamu hanya memperlambat manusianya.
Sebagian besar bengkel menerima hambatan itu sebagai “biaya untuk tetap aman.” Mereka tidak pernah bertanya apakah ada cara untuk membiarkan operator tetap di benda kerja sementara mesin membuktikan—secara matematis—bahwa ia bisa berhenti sebelum mencapai kulit dalam 14 mm.
Jika mundur adalah satu‑satunya hal yang menjaga jarimu tetap utuh, apa yang terjadi ketika mesin bahkan tidak bisa berhenti cukup cepat sejak awal?
Kamu berdiri di mesin rem, tangan di flensa 36 inci, mata pada ujung punch. Ram sedang turun pada kecepatan produksi—jauh di atas 10mm/detik. Naluri Anda berkata: jika sesuatu berjalan salah, sistem keselamatan akan menghentikannya.
Inilah pertanyaan yang benar-benar penting: bisakah itu berhenti dalam 14 mm jarak dari tempat jari Anda akan berada?
Bukan “apakah ada dua tombol.” Bukan “apakah ada laser.” Bukan “apakah si penjual bilang alat ini sesuai standar.” Di bawah ANSI B11.3, seluruh model risiko disederhanakan menjadi satu ukuran keras—seberapa jauh ram bergerak dari saat bahaya terdeteksi hingga gerakan benar‑benar berhenti. Jika jarak itu melebihi 14 mm pada kecepatan produksi, Anda tidak memiliki perlindungan jarak dekat. Anda hanya punya pertunjukan.
Dan pertunjukan tidak memperlambat baja.
Press brake adalah sepasang rahang yang menutup. Kontrol dua tangan membuat Anda mundur dari gigi sebelum menggigit. Sebuah AOPD—perangkat pelindung optoelektronik aktif—berusaha mengatur waktu gigitan agar rahang berhenti sebelum menutup sepenuhnya. Namun keduanya tidak berarti jika kinerja pengereman mesin secara fisik tidak dapat memenuhi 14 mm jangka waktu tersebut.
Jadi sebelum Anda bertanya pelindung mana yang terbaik, ajukan pertanyaan yang lebih sulit: berapa jarak berhenti aktual Anda, diukur saat beroperasi dengan beban, hari ini?
OSHA tidak peduli apa yang Anda pasang. Mereka peduli tentang hubungan antara waktu berhenti dan jarak aman di bawah 29 CFR 1910 Subbagian O. Hubungan itu bersifat aritmetika, bukan opini.
Begini cara penerapannya di lapangan.
Jika rem Anda beroperasi lebih cepat dari 10mm/detik, ANSI B11.3 tidak memungkinkan Anda mengandalkan “kecepatan aman” saja. Pada kecepatan tersebut, operator dapat menjangkau ruang cetakan sebelum ram sempat melambat kecuali perangkat pendeteksi keberadaan mendeteksi intrusi dan ram berhenti dalam jarak yang terverifikasi—sekali lagi, pikirkan 14 mm sebagai ambang batas penting untuk sistem AOPD jarak dekat.
Sekarang bayangkan tirai cahaya dipasang 200 mm dari titik jepit. Jika jarak berhenti yang diukur adalah 120 mm, Anda baik‑baik saja—di atas kertas. Namun jika operator dapat berdiri di antara tirai dan cetakan tanpa terdeteksi, Anda telah menciptakan titik buta geometris. Standar secara eksplisit mensyaratkan perlindungan tambahan dalam skenario itu. Jarak tanpa deteksi adalah celah yang cukup besar untuk sebuah tangan.
Jadi variabel sebenarnya bukan perangkatnya. Melainkan:
Waktu berhenti × kecepatan mendekat = jarak aman minimum.
Jika Anda belum pernah menghitungnya untuk press brake spesifik Anda, dengan kondisi hidrolik Anda, pada kecepatan produksi Anda, berarti Anda menebak. Dan menebak di depan petugas kepatuhan OSHA cepat berubah menjadi surat peringatan. Mereka tidak memberi denda pada merek sensor. Mereka memberi denda atas kinerja berhenti yang tidak terverifikasi.
| Topik | Detail |
|---|---|
| Dasar Regulasi | OSHA mengevaluasi kepatuhan berdasarkan hubungan antara waktu berhenti dan jarak aman di bawah 29 CFR 1910 Subbagian O. Hubungan ini bersifat aritmetika, bukan opini. |
| Batasan Kecepatan Aman | Jika kecepatan pengereman melebihi 10 mm/detik, ANSI B11.3 tidak mengizinkan mengandalkan “kecepatan aman” saja. |
| Risiko pada Kecepatan Lebih Tinggi | Pada kecepatan di atas 10 mm/detik, operator dapat mencapai ruang cetakan sebelum ram melambat kecuali perangkat deteksi kehadiran mendeteksi intrusi dan menghentikan ram dalam jarak yang telah diverifikasi (misalnya, ambang batas 14 mm untuk sistem AOPD jarak dekat). |
| Contoh Tirai Cahaya | Tirai cahaya yang dipasang 200 mm dari titik jepit dengan jarak berhenti terukur sebesar 120 mm terlihat sesuai ketentuan di atas kertas. |
| Risiko Titik Buta Geometris | Jika operator dapat berdiri tanpa terdeteksi antara tirai dan cetakan, terdapat titik buta. Standar mengharuskan perlindungan tambahan dalam kasus ini. Jarak tanpa deteksi menciptakan risiko serius. |
| Rumus Inti | Waktu berhenti × kecepatan pendekatan = jarak aman minimum |
| Risiko Kepatuhan | Jika jarak berhenti belum dihitung untuk rem spesifik, kondisi hidraulik, dan kecepatan produksi, kepatuhan didasarkan pada tebakan. OSHA menyebutkan kinerja berhenti yang tidak terverifikasi—bukan merek sensor. |
Mari kita konkretkan.
Tes overrun mengukur seberapa jauh ram bergerak setelah sinyal berhenti diinisiasi. Bukan seberapa cepat seharusnya berhenti. Seberapa cepat benar-benar berhenti. Dengan beban. Pada suhu tertentu. Pada mesin itu.
Anda menjalankan ram pada kecepatan pendekatan normal. Anda memicu berhenti—baik melalui sistem kontrol atau fungsi uji AOPD. Anda mengukur jarak dari sinyal hingga berhenti penuh. Angka itu adalah kebenaran Anda.
Saya pernah melihat rem yang diiklankan sebagai “Siap AOPD” yang overrun 22mm pada pagi yang dingin dan 18mm setelah makan siang ketika oli menjadi lebih encer. Kedua angka melebihi 14 mm. Kedua angka mendiskualifikasi mesin dari pengamanan jarak dekat sejati sesuai ANSI B11.3 ekspektasi.
Dan ini bagian pentingnya: panduan OSHA mengharuskan kinerja berhenti dipantau untuk penyimpangan pada setiap stroke. Bukan sekali setahun. Bukan “ketika bagian perawatan sempat”. Jika waktu berhenti Anda melenceng dan Anda tidak mengetahuinya, jarak aman yang dihitung adalah fiksi.
Fiksi itu mahal. Inspektur tidak memperdebatkan niat Anda; mereka mengukur angka Anda.
Jadi ketika sebuah bengkel berkata pada saya, “Kami memasang laser, kami sudah aman,” pertanyaan pertama saya sederhana: tunjukkan tes jarak berhenti terakhir yang terdokumentasi. Jika mereka tidak bisa, seluruh narasi keselamatan runtuh dalam waktu sekitar tiga puluh detik.
Jika Anda tidak bisa membuktikan ram berhenti sebelum menyentuh daging dalam 14 mm, Anda tidak memiliki keselamatan rekayasa. Anda memiliki optimisme dengan kabel.
Sekarang kita sampai pada bagian yang tidak ingin didengar oleh siapa pun.
AOPD adalah perangkat yang sangat jujur. Banyak sistem yang dibangun untuk ANSI B11.3 tidak akan membiarkan rem beroperasi pada kecepatan penuh jika laser gagal. Beberapa tidak akan berjalan sama sekali. Itu bukan cacat desain—itu adalah standar yang memaksa pilihan: perbaiki perlindungan atau hentikan produksi.
Namun di sinilah bengkel terbakar.
Mereka memasang AOPD modern ke sistem hidrolik berusia 20 tahun dengan katup proporsional yang aus, spool yang macet, dan respons pompa yang kurang maksimal. Sensor mendeteksi intrusi dalam hitungan milidetik. Kontrol langsung mengirimkan perintah berhenti. Katup ragu-ragu. Tekanan turun perlahan. Ram meluncur.
Deteksi cepat. Deselerasi tidak.
Jika rangkaian hidrolik Anda tidak dapat membuang tekanan dan menutup aliran dengan cepat untuk memenuhi 14 mm jangka waktu penghentian, sensor tercanggih di dunia tidak dapat menyelamatkan Anda. Sensor itu menjadi saksi kegagalan.
Saya telah mengaudit mesin yang secara mekanis tidak mampu memenuhi syarat untuk AOPD jarak dekat karena jarak berhentinya melebihi jendela yang diizinkan. Standarnya jelas: rem yang tidak dapat berhenti secara andal dalam jarak tersebut tidak berfungsi memadai untuk dipasangi metode pengamanan itu. Anda tidak bisa mengandalkan perangkat lunak untuk mengatasi oli yang lambat.
Jadi inilah kenyataan yang harus dihadapi.
Sebelum Anda menganggarkan untuk laser, sebelum Anda menjanjikan operator bahwa mereka dapat tetap di benda kerja tanpa mundur, Anda uji mesin. Anda verifikasi jarak berhenti. Anda evaluasi waktu respons katup, penurunan tekanan hidrolik, dan latensi kontrol sebagai satu sistem.
Karena jika ram Anda tidak dapat berhenti dalam 14 mm, setiap perangkat keselamatan lain di dunia hanyalah sandiwara—dan surat teguran yang menyusul tidak peduli seberapa canggih sensor Anda terlihat di brosur.
Katakanlah rem hidrolik tahun 1992 Anda melampaui 18 mm setelah makan siang dan 22 mm saat start dingin. Anda melakukan tesnya. Anda punya angkanya. Begitu dekat dengan 14 mm hingga Anda bisa merasakannya — namun tetap di luar jendela untuk perlindungan jarak dekat sejati di bawah ANSI B11.3.
Jadi apa pilihan Anda?
Jika mesin secara fisik tidak dapat berhenti dalam 14 mm, Anda punya tiga jalan yang jujur. Satu: membangun kembali respons hidrolik — katup, seal, penurunan tekanan, latensi kontrol — sampai waktu berhenti memenuhi syarat. Dua: memindahkan perangkat sensor kehadiran lebih jauh dari cetakan untuk menyesuaikan jarak berhenti yang sebenarnya, yang meningkatkan jarak aman dan mendorong operator mundur. Tiga: kembali ke kontrol dua tangan atau penjagaan perimeter dan menerima penurunan produksi.
Itu saja. Tidak ada pintu keempat.
Tapi saat mesin ditunjukkan oleh penjual. memenuhi persyaratan penghentian — diverifikasi, didokumentasikan, dipantau setiap ayunan — di situlah Perangkat Opto‑Elektronik Aktif menjalankan fungsinya. Tidak seperti kontrol dua tangan yang memaksa operator mundur dari rahang baja, sebuah AOPD mengikuti ram turun, melindungi titik gigitan sebenarnya hingga titik mati tercapai. Perlindungan berada di tempat bahaya berada.
Dan itulah titik porosnya.
Kontrol dua tangan melindungi awal gerakan. AOPD melindungi gerakan berbahaya.
Jika perangkat keselamatanmu melindungi mesin dengan lebih andal daripada tubuh operator, sebenarnya apa yang kamu optimalkan?
Bayangkan sebuah rem 10 kaki membengkokkan sebuah baki dangkal. Tirai cahaya standar dipasang 200 mm dari ruang die untuk memenuhi jarak keselamatan yang dihitung berdasarkan waktu penghentian. Operator memuat blanko, ram mulai turun, dan di pertengahan ayunan, flange balik memutuskan sinar.
Berhenti. Reset. Siklus lagi.
Itulah trip mengganggu yang dikeluhkan semua orang.
Masalahnya bukan tirainya. Masalahnya geometri.
Tirai cahaya tradisional menciptakan dinding deteksi vertikal. Apa pun yang memasuki dinding itu menghentikan ayunan. Itu sempurna ketika tujuan Anda adalah menjaga semua personel keluar dari seluruh zona bahaya selama ayunan penuh — terutama pada bagian besar atau ruang kerja bersama. Tetapi selama pembengkokan kotak atau pekerjaan flange, bagian itu sendiri menjadi penyusup.
Sistem laser AOPD jarak dekat bekerja secara berbeda. Mereka memproyeksikan bidang sensor sempit hanya beberapa milimeter di atas bukaan die dan bergerak bersama ram hingga titik mati yang diprogram. Alih‑alih melindungi ruang kosong 200 mm jauhnya, mereka melindungi langsung titik cubitan — dan menghentikan ram jika ada sesuatu yang masuk ke zona tersebut sebelum kedalaman mati.
Tidak ada zona buta antara tirai dan die. Tidak perlu mundur. Tidak ada pemutusan sinar di tengah ayunan akibat geometri bagian.
Sistem modern bahkan memungkinkan Anda beralih antar mode — laser untuk pembengkokan kotak rapat, tirai cahaya untuk perkakas tinggi atau perlindungan penuh — melalui HMI, dengan pemantauan waktu berhenti aktif di kedua mode. Pendekatan hybrid itu mengakhiri perdebatan lama pilihan salah satu saja.
Trip mengganggu bukanlah bukti bahwa tirai cahaya tidak berguna. Itu adalah bukti bahwa perlindungan berbasis jarak dan pekerjaan titik operasi adalah solusi untuk masalah yang berbeda.
Pasang tirai cukup jauh untuk memenuhi jarak penghentian nyata Anda dan Anda kehilangan kedekatan. Pasang tirai dekat tanpa mengukur waktu berhenti dan Anda kehilangan kepatuhan.
Dan jika perhitungan jarak keselamatan Anda tidak sesuai dengan kinerja penghentian yang Anda dokumentasikan, Anda baru saja memberikan inspektur sebuah pelanggaran dengan nama Anda di atasnya.
Sekarang kita masuk ke bagian yang sering kacau dilakukan bengkel.
Selama pembengkokan kotak, flensa harus masuk ke dalam bidang deteksi. Jika sistem berhenti setiap kali logam melintasi sinar, Anda tidak akan pernah menyelesaikan sebuah bagian. Jadi kami menggunakan muting — yaitu titik terprogram dalam langkah kerja di mana AOPD mengizinkan material masuk karena celah yang tersisa lebih kecil dari jarak aman yang telah divalidasi.
Jika dilakukan dengan benar, muting terikat langsung pada jarak berhenti yang terukur. Jika jarak lebih‑lari Anda yang telah diverifikasi adalah 13 mm, titik mute ditetapkan sehingga ram tidak dapat bergerak lebih jauh dari jarak tersisa itu sebelum benar‑benar berhenti.
Jika dilakukan dengan malas, operator “menonaktifkan” zona atau menekan perangkat demi kenyamanan.
Penonaktifan menyeluruh terasa produktif. Sampai seseorang menjulurkan tangan di jendela yang tidak terlindungi itu.
Menurut ANSI B11.3, muting harus dikendalikan, didokumentasikan, dan terikat pada kinerja pemberhentian mesin tertentu itu. Banyak AOPD modern memantau waktu berhenti di setiap langkah dan akan mengunci mesin jika penyimpangan melebihi batas yang diizinkan. Itu bukan karena sistem rewel. Itu karena sistem mencegah perhitungan mute Anda menjadi fiksi.
Saya telah melihat bengkel menonaktifkan pemantauan waktu berhenti karena penguncian yang dianggap mengganggu memperlambat produksi. Mereka masih “menjalankan laser.”
Dia “patuh.”
Sampai laporan inspeksi membandingkan data berhenti yang tercatat dengan rumus jarak aman yang disyaratkan di bawah 29 CFR 1910 Subbagian O.
Anda tidak bisa mem‑mute fisika. Dan Anda tidak bisa berdebat dengan petugas kepatuhan yang memegang meteran dan catatan pemeliharaan Anda sendiri.
Mari kita bicarakan throughput.
Pada pengaturan kontrol dua tangan, perhatikan operator berpengalaman menjalankan 200 braket kecil. Tangan meninggalkan bagian. Menekan tombol. Menunggu penurunan. Tangan kembali. Memposisikan ulang.
Urutan mikro itu memakan waktu mungkin setengah detik lebih lama per siklus dibandingkan tetap berada di posisi kerja.
Setengah detik terdengar sepele. Untuk 200 bagian, itu 100 detik. Untuk 1.000 bagian, itu lebih dari delapan menit. Dan itu sebelum Anda memperhitungkan mikro‑keraguan, salah tekan tombol, posisi yang kikuk yang memperlambat penempatan.
Dengan AOPD jarak dekat, tangan operator tidak pernah meninggalkan bagian kecuali mereka memilih untuk melakukannya. Ram turun dengan kecepatan normal, perlindungan aktif hingga mute. Tidak perlu melangkah mundur. Tidak perlu menjangkau tombol. Cukup muat, sejajarkan, siklus, ulangi.
Bengkel mengira keselamatan akan mengorbankan waktu. Saat mereka beralih dari kontrol dua tangan ke AOPD yang dikonfigurasi dengan benar pada mesin tekuk yang memenuhi syarat di dalam 14 mm, mereka sering terkejut melihat waktu siklus yang sama atau bahkan lebih cepat — karena gerakan operator menjadi lebih pendek.
Gerakan lebih pendek. Lebih sedikit kelelahan. Lebih sedikit penundaan mikro.
Namun ini hanya berlaku jika kinerja penghentian mesin nyata dan stabil. Jika keterlambatan hidrolik memaksa Anda memasang perlindungan lebih jauh, Anda kembali harus melangkah keluar dari zona dan menghilangkan efisiensi tersebut.
Jadi inilah batas kerasnya.
Jika rem Anda tidak dapat menghentikan dengan andal dalam 14 mm, Anda bisa memperbaiki hidrolik, menerima jarak aman yang lebih besar dengan kedekatan yang berkurang, atau tetap menggunakan kontrol dua tangan dan keluaran yang lebih lambat. AOPD bukanlah sihir. Itu adalah matematika yang bergantung pada minyak dan baja.
Dan jika Anda mengklaim perlindungan jarak dekat tanpa data penghentian yang terdokumentasi untuk mendukungnya, peningkatan produksi tidak akan berarti ketika denda mendarat di meja Anda.
Musim gugur lalu saya berdiri di samping mesin press brake sepanjang 10 kaki sementara seorang petugas kepatuhan OSHA membolak-balik sebuah binder dan menanyakan tiga hal: hasil uji waktu penghentian terbaru, bukti penilaian risiko sesuai ANSI B11.3, dan catatan yang menunjukkan monitor waktu penghentian tidak dilewati. Bengkel tersebut memiliki laser pada ram atau penumbuk. Pemiliknya terus berkata, “Kami aman.”
Inspektur tersebut tidak peduli tentang perangkat keras. Dia peduli dengan angka.
Dia menginginkan data jarak lebihan yang terdokumentasi dalam milimeter pada suhu operasi penuh, konfirmasi bahwa sistem berhenti dalam 14 mm dengan beban terburuk, dan bukti bahwa titik muting dihitung dari data tersebut—bukan ditebak. Dia membandingkan jarak penghentian yang tercatat dengan kedalaman mute yang dikonfigurasi. Lalu dia meminta catatan perawatan untuk membuktikan bahwa kinerjanya tidak menyimpang.
Itulah yang terlihat sebagai “siap inspeksi” dalam praktik: jarak penghentian terukur (dingin dan hangat), jarak aman terhitung, logika muting terikat, pemantauan waktu penghentian otomatis diaktifkan, dan penilaian risiko yang ada di arsip yang merujuk ANSI B11.3 dan metodologi B11.0. Bukan stiker. Bukan brosur penjualan. Perhitungan yang bisa Anda pertahankan.
Dan jika dokumen Anda mengatakan 14 mm namun penghentian terakhir yang terverifikasi adalah 18, denda itu akan datang dengan bunga.
Sekarang mari bicara tentang di mana matematika bertemu dunia nyata.
Bayangkan sebuah kotak empat sisi, flensa 3 inci di semua sisi. Pada tekukan ketiga, flensa-flensa itu menonjol seperti tanduk. Saat ram turun, bagian tersebut masuk ke dalam bidang sensor. Dengan tirai cahaya tradisional yang dipasang dua kaki dari mesin, Anda membutakan zona kiri dan kanan hanya untuk menyelesaikan bagian.
Pembutaan bukanlah hal jahat. Pembutaan tanpa panduan adalah.
Menurut ANSI B11.3, AOPD jarak dekat hanya diizinkan setelah penilaian risiko yang terdokumentasi. Penilaian tersebut harus mempertimbangkan geometri bagian, tinggi perkakas, jangkauan operator, dan kinerja penghentian mesin yang telah divalidasi. Jika flensa memaksa tangan operator berada dalam 14 mm menghentikan jendela sebelum bisu, Anda bisa menyesuaikan proses atau beralih mode.
Sistem modern memungkinkan Anda beralih dari laser ke tirai melalui HMI, dengan pemantauan waktu berhenti aktif di keduanya. Pengaturan hibrida itu menangani mungkin 95% pembentukan biasa. Sisanya 5%—kotak sempit, perkakas tinggi, pukulan ulang yang sulit—memerlukan disiplin. Kadang itu berarti mode kecepatan aman untuk sebagian langkah. Kadang berarti mengurutkan ulang tekukan agar tangan tetap jauh saat kecepatan penuh.
Yang tidak pernah berarti adalah menonaktifkan perangkat karena “bagian terus memicu itu.”
Saya pernah melihat operator muda menjangkau ke zona yang sebagian dibisukan untuk menahan dinding kotak. Ram melampaui lebih dari yang diharapkan—lag hidraulik di pagi yang dingin. Dia kehilangan ujung jari telunjuknya. Potongan bersih. Tidak ada drama. Hanya rahang baja menutup beberapa milimeter lebih jauh daripada yang diasumsikan di dokumen.
Anda bisa berdebat dengan jadwal produksi. Anda tidak bisa berdebat dengan viskositas minyak dan gravitasi.
Jika penilaian risiko Anda tidak secara eksplisit membahas geometri kompleks, inspektur akan melakukannya—dan dia akan memberi harga kelalaian itu sesuai.
Sekarang ambil bagian selebar dua inci. Ujung jari operator secara alami berada dalam jarak satu inci dari pembukaan die saat penyelarasan. Pada kecepatan pendekatan penuh, satu‑satunya perlindungan Anda adalah kemampuan AOPD untuk mendeteksi intrusi dan memerintahkan berhenti sebelum ram bergerak lebih dari 14 mm.
Itu mengasumsikan hidraulik Anda merespon secara instan dan konsisten.
Pada rem yang lebih tua, waktu respons katup menciptakan celah yang terukur antara sinyal berhenti dan penghentian mekanis. Saya telah merekam mesin yang memenuhi spesifikasi saat hangat tetapi melebihinya saat dingin beberapa milimeter. Penyimpangan itu memaksa dua pilihan: menambah jarak aman—menghilangkan kedekatan—atau membatasi ram hingga ≤10mm/dtk untuk seluruh langkah.
Sepuluh milimeter per detik.
Pada kecepatan itu, Anda menghapus keuntungan throughput dibanding kontrol dua tangan. Waktu siklus memanjang. Operator menjadi tidak sabar. Manajemen mulai bertanya mengapa rem laser “lebih cepat” terasa lambat.
Karena fisika menetapkan batas atas.
Mode kecepatan aman ada karena alasan tertentu. Gunakan kecepatan penuh untuk pendekatan dengan AOPD aktif saat tervalidasi. Beralih ke kecepatan aman ketika tangan harus tetap dekat dan geometri tidak memungkinkan pemisahan bisu yang andal. Programkan. Dokumentasikan. Latihkan.
Jika perangkat keselamatanmu melindungi mesin dengan lebih andal daripada tubuh operator, sebenarnya apa yang kamu optimalkan?
Menjalankan bagian kecil pada kecepatan penuh tanpa data berhenti yang terverifikasi, Anda bukan hanya mempertaruhkan jari—Anda berjudi dengan pelanggaran yang akan menuliskan kecepatan maksimum ram Anda dengan tinta hitam.
Di sinilah sebagian besar bengkel kehilangan keselamatan dan produksi: mereka memasang AOPD lalu melupakannya.
Lensa laser mengumpulkan kabut minyak. Braket pemasangan tergeser saat pergantian die. Kabel harness longgar. Sistem masih menyala. Indikator tetap hijau. Namun penyelarasan bergeser satu milimeter setiap kali.
AOPD modern dengan pemantauan waktu berhenti terintegrasi akan mendeteksi penyimpangan dan memaksa kecepatan aman atau mengunci mesin. Operator membenci itu. Supervisor membencinya lebih. Jadi seseorang menonaktifkan pemantauan “sementara.”
Dia “patuh.”
Sampai suatu hari kontaminasi menyebabkan kesalahan deteksi yang berselang dan mesin kembali ke ≤10mm/dtk setiap langkah lainnya. Produksi merosot. Atau lebih buruk, sistem gagal mendeteksi tangan saat pendekatan berkecepatan tinggi karena geometri sinar bergeser di luar toleransi yang telah dikalibrasi.
Pemeriksaan visual harian. Pembersihan mingguan. Verifikasi waktu berhenti secara penuh beban yang terdokumentasi setiap tiga bulan. Tinjauan penilaian risiko tahunan. Itu bukan pekerjaan birokrasi; itu yang menjaga 14 mm janji tetap nyata, bukan sekadar teoritis.
Cara tercepat kehilangan perlindungan dan produktivitas adalah dengan menganggap sensor akan menyelamatkan Anda sambil mengabaikan katup yang tidak bisa mencapai spesifikasi atau lensa yang belum Anda bersihkan selama enam bulan.
Lewati disiplin itu, dan orang berikutnya yang menghitung jarak berhenti Anda akan mengenakan lencana dan menulis angka yang diawali tanda dolar.
Anda tidak tetap siap inspeksi hanya dengan membeli laser. Anda tetap siap inspeksi dengan membangun sistem kontrol yang dapat membuktikan, sesuai permintaan, bahwa ram Anda akan berhenti di dalam 14 mm dalam kondisi produksi nyata.
Itu adalah titik balik yang paling sering terlewat oleh bengkel. Mereka memperlakukan AOPD sebagai peningkatan produktivitas dan kepatuhan sebagai binder di rak. Di bawah ANSI B11.3, keduanya adalah hal yang sama. Jika pengamanan Anda tidak andal secara kontrol, divalidasi, dan didokumentasikan sebelum produksi pertama, Anda tidak patuh—Anda hanya beruntung. Dan keberuntungan habis pada hari seorang inspektor meminta verifikasi waktu berhenti terakhir yang dilakukan di bawah tonase penuh.
Jadi, pertanyaannya bukan “Apakah saya punya laser?”
Pertanyaannya adalah “Bisakah saya mempertahankan setiap milimeter perjalanan ram antara deteksi dan berhenti?”
“Andal secara kontrol” berarti satu kesalahan tidak dapat mengakibatkan hilangnya fungsi keselamatan. Saluran ganda. Umpan balik terpantau. Katup redundan. Deteksi kesalahan yang memaksa ke kondisi aman. Itulah bahasa ANSI B11.3 dan keluarga B11 secara umum.
Curtain cahaya mandiri yang terhubung ke sirkuit kopling lama bukanlah itu. Begitu pula laser yang dihubungkan ke satu katup solenoid tanpa pemantauan posisi spool. Jika katup macet dan ram melaju melewati 14 mm, sensor Anda melakukan tugasnya. Hidrolik Anda tidak. Dan standar tidak memberi nilai hanya berdasarkan usaha.
Integrasi berarti sinyal AOPD mengalir ke sistem kontrol bersertifikasi keselamatan yang memantau waktu berhenti secara terus-menerus atau pada interval tertentu. Itu berarti katup hidrolik Anda dirancang atau dimodifikasi ulang untuk redundansi dan pemeriksaan mandiri. Itu berarti kesalahan memaksa ke kecepatan aman atau lockout—bukan “tetap siklus”.”
Di sinilah sebagian besar retrofit runtuh. Bengkel menambahkan sensor premium ke arsitektur kontrol yang dibangun pada tahun 1992 dan menganggapnya modern. Dia “patuh”.”
Sampai seorang inspektor menelusuri rangkaian keselamatan, melihat tidak ada pemantauan respons katup, dan bertanya bagaimana Anda menjamin jarak berhenti yang membenarkan operasi jarak dekat. Saat itulah percakapan berubah menjadi pelanggaran dengan angka berkomma.
Jika perangkat keselamatanmu melindungi mesin dengan lebih andal daripada tubuh operator, sebenarnya apa yang kamu optimalkan?
Kamu tidak memulai dengan kutipan. Kamu memulai dengan penilaian bahaya.
Sebelum pesanan pembelian pernah meninggalkan meja Anda, Anda mendokumentasikan: model mesin, tonase, waktu berhenti terukur dalam kondisi panas dan dingin, tinggi perkakas, geometri bagian yang umum, jangkauan operator, dan pekerjaan mana yang termasuk dalam 14 mm jendela kelayakan tersebut. Jika mesin tidak dapat berhenti secara konsisten dalam jendela itu, aturannya tegas: mesin tersebut tidak berfungsi dengan cukup baik untuk dipasangi AOPD jarak dekat.
Itu bukan preferensi. Itu diskualifikasi.
Sekarang inilah bagian yang tidak terlihat jelas: penilaian ini melindungi produksi sama banyaknya dengan keselamatan. Saat Anda memetakan pekerjaan mana yang memerlukan mode hibrid—laser plus tirai, atau laser plus kecepatan aman—Anda mencegah kepanikan sore Jumat di mana seseorang menonaktifkan saluran karena “bagian terus memicu” sensor. Anda sudah menentukan pekerjaan mana yang memerlukan pengamanan alternatif dan memprogramnya sesuai.
Inspektur tidak mengharapkan kesempurnaan. Mereka mengharapkan bukti. Penilaian risiko tertulis yang merujuk pada ANSI B11.3 klausa, tes waktu berhenti yang terdokumentasi saat beban, dan mode pengamanan yang ditentukan per keluarga pekerjaan menunjukkan kepada mereka bahwa Anda mengelola risiko, bukan bereaksi terhadapnya.
Jelaskan kepada mereka matematika itu dengan tenang.
Atau biarkan mereka melakukannya untuk Anda dengan kalkulator dan jadwal penalti.
Kontrol dua tangan melatih satu generasi untuk mundur dari rahang mesin dan menahan tombol hingga seperempat inci dari dasar. Itu bukan hanya metode; itu adalah memori otot. Saat Anda beralih ke pengoperasian pedal kaki dengan AOPD jarak dekat, Anda meminta operator untuk memegang bagian dekat baja yang bergerak dan memercayai waktu berhentinya.
Kepercayaan tidak datang dari manual. Ia datang dari demonstrasi.
Anda menunjukkan kepada mereka jarak berhenti yang diukur. Anda menjelaskan apa 14 mm artinya dalam ruang fisik—kurang dari ketebalan jari kelingking mereka. Anda mendemonstrasikan kondisi kesalahan: memblokir sinar, melihat mesin memaksa kecepatan aman. Mensimulasikan kesalahan katup dan menunjukkan penguncian. Sekarang sistem bukanlah sihir; itu dapat diprediksi.
Dan itu sebelum Anda memperhitungkan micro‑hesitasi, kesalahan tekan tombol, posisi tubuh yang canggung yang memperlambat penempatan. Saat operator menyadari mereka dapat menstabilkan bagian kecil secara alami, memicu dengan pedal kaki, dan mempertahankan kecepatan pendekatan penuh karena waktu berhenti telah divalidasi, throughput berhenti bertentangan dengan keselamatan.
Tapi Anda juga melatih batas‑batasnya. Pekerjaan mana yang memerlukan kecepatan aman. Mana yang memerlukan beralih ke mode tirai. Mana yang memerlukan kembali ke kontrol dua tangan karena geometri mengalahkan sensor jarak dekat. AOPD mengungguli kontrol dua tangan di mana keduanya memungkinkan; ia tidak menghapusnya dari perangkat Anda.
Jelaskan itu, atau seorang operator akan berimprovisasi.
Dan improvisasi adalah apa yang disebut inspektur sebagai “disengaja.”
Inilah sudut pandang yang ingin saya bawa ke depan: kepatuhan bukanlah pilihan perangkat. Itu adalah rantai fisika yang dapat dipertanggungjawabkan, terhubung pada keandalan kontrol, didokumentasikan sebelum produksi, dan diperkuat hingga mengubah memori otot.
Saat Anda membangun sistem seperti itu, rahang baja tidak menjadi lebih lambat. Mereka menjadi dapat diprediksi. Dan prediktabilitas adalah yang memungkinkan Anda menjalankan kecepatan penuh tanpa mempertaruhkan jari atau denda.
Sekarang lihat rem tertua Anda dan tanyakan satu pertanyaan sulit kepada diri sendiri: apakah benar-benar dapat berhenti di dalam 14 mm—dingin, bermuatan, dan terverifikasi—atau apakah Anda sedang merancang strategi keselamatan untuk mesin yang pada dasarnya tidak pernah memenuhi syarat sejak awal?


















