

Mùa đông năm ngoái, một chủ cửa hàng kéo tôi đến xem máy uốn kim loại “mới” của ông ấy như thể đó là một con bê mới sinh. Màn hình cảm ứng màu lớn. Trình đơn vuốt. Đồ họa 3D. Công việc đầu tiên với nó? Hai mươi bốn giá đỡ, tám cái bị loại bỏ. Cùng độ lệch chiều dài mép uốn như trên chiếc máy cũ.
Ông ấy cứ gõ lên màn hình như thể nó đã phản bội mình. Tôi thì cứ nhìn vào khung hai bên.
Có gì đó không hợp lý.
Trên giấy tờ, chiếc máy ép đó thật ấn tượng: điều khiển CNC, thước đo hậu lập trình được, hai xi-lanh được gắn nhãn Y1/Y2, và một giao diện bóng bẩy có thể vẽ chi tiết ở dạng 3D trước khi thực hiện một lần ép. Đại diện bán hàng hứa hẹn độ chính xác cao hơn chỉ bằng việc “chuyển sang kỹ thuật số.”
Nhưng khi chúng tôi kiểm tra thanh trượt trong quá trình uốn dài, phía bên trái chạm đáy sớm hơn bên phải một chút. Không nhiều. Nhưng đủ để làm lệch một chi tiết dài 36 inch khỏi dung sai cho phép.
Điều cần thay đổi là: độ chính xác không sinh ra từ màn hình; nó sinh ra từ các trục độc lập thực sự di chuyển thép — Y1/Y2 trục Y cho độ song song của thanh trượt, X cho độ sâu, R cho chiều cao, Z cho vị trí ngang. Nếu các trục đó không thể di chuyển độc lập để phù hợp với hình học của chi tiết, thì màn hình cảm ứng chỉ là tấm kính mặt tiền trên khung yếu.
Bạn không thể sửa lỗi nền móng bằng cách làm cho cửa sổ đẹp hơn.
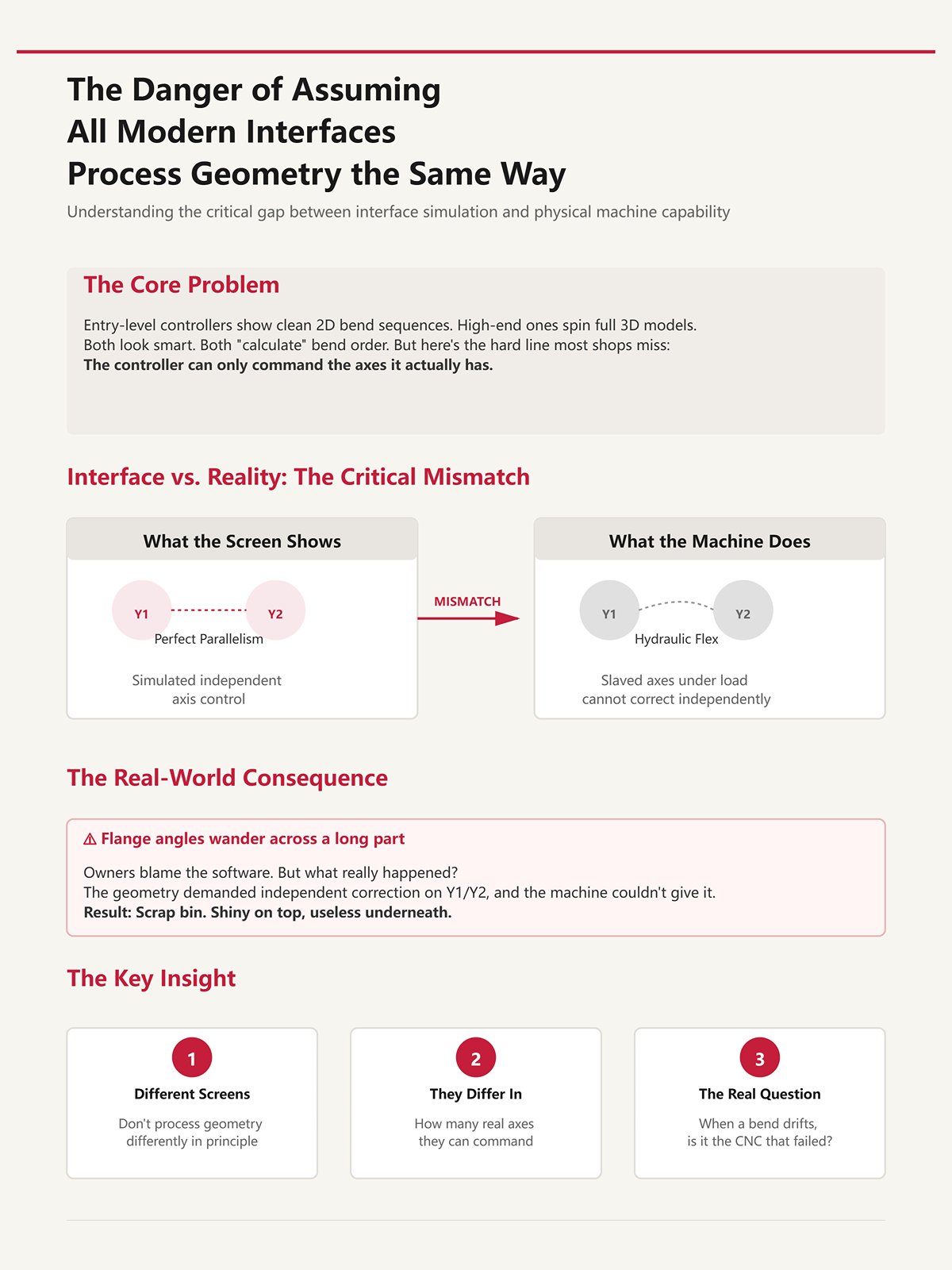
Tôi đã vận hành các bộ điều khiển cấp độ cơ bản hiển thị trình tự uốn 2D rõ ràng và những bộ điều khiển cao cấp xoay mô hình 3D như trò chơi điện tử. Cả hai đều trông thông minh. Cả hai đều “tính toán” trình tự uốn.
Nhưng có một ranh giới rõ ràng mà hầu hết các xưởng đều bỏ qua: bộ điều khiển chỉ có thể ra lệnh cho những trục mà nó thực sự có.
Nếu các trục của máy Y1/Y2 được nối liền với nhau bằng thuỷ lực thay vì được điều khiển độc lập, thì màn hình có thể mô phỏng độ song song hoàn hảo trong khi thanh trượt thực tế lại cong vênh dưới tải. Giao diện không nói dối. Nó chỉ giả định khả năng phần cứng mà máy không có.
Tôi từng thấy chủ xưởng đổ lỗi cho phần mềm khi góc mép uốn bị thay đổi trên một chi tiết dài. Thực tế xảy ra gì? Hình học yêu cầu hiệu chỉnh độc lập trên Y1/Y2, và máy không thể thực hiện được. Sự lệch đó đi thẳng vào thùng phế liệu như những tấm kim loại cắt sai mà bạn không thể cắt lại — bên ngoài sáng bóng nhưng bên trong vô dụng.
Các màn hình khác nhau không xử lý hình học khác nhau về nguyên tắc. Chúng chỉ khác nhau ở chỗ có thể điều khiển bao nhiêu trục thực để khiến hình học đó trở thành hiện thực trong thép.
Vì vậy, khi một góc uốn bị lệch, bạn có chắc chính “CNC” là thứ đã thất bại không?
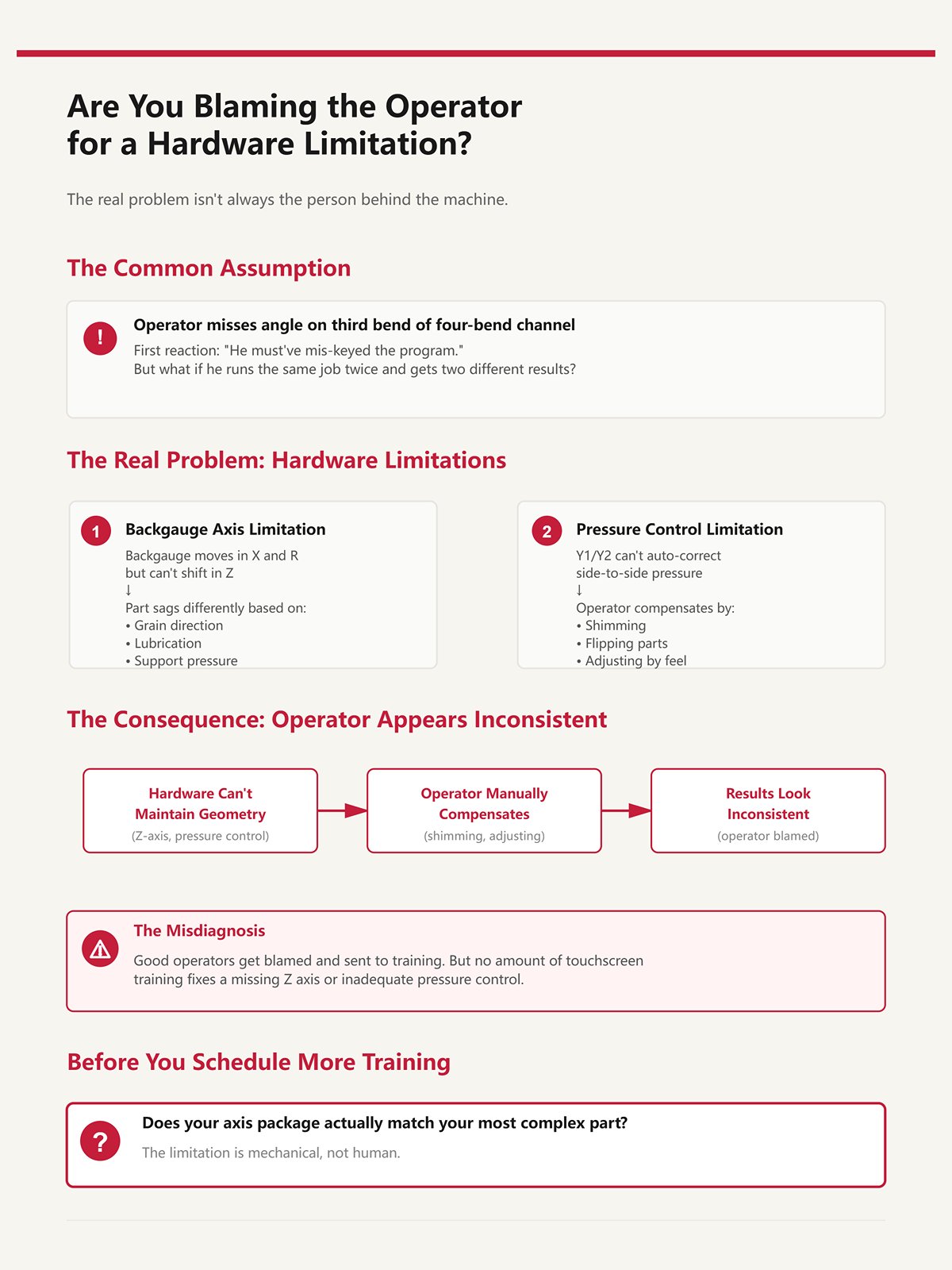
Một người bị lệch góc ở lần uốn thứ ba của một kênh có bốn lần uốn. Phản ứng đầu tiên ở hầu hết các xưởng? “Chắc anh ta nhập sai chương trình.”
Câu hỏi hợp lý — cho đến khi bạn thấy anh ta chạy cùng một công việc hai lần và cho ra hai kết quả hơi khác nhau.
Nếu thước chặn sau chỉ di chuyển theo X và R mà không thể dịch chuyển theo Z để đỡ mặt bích lệch, thì chi tiết sẽ chùng khác nhau tùy theo hướng vân, độ bôi trơn, thậm chí cả mức lực anh ta dùng để đỡ. Không có lượng đào tạo nào trên màn hình cảm ứng có thể sửa được việc thiếu trục Z. Nếu Y1/Y2 không thể tự động hiệu chỉnh áp lực hai bên, người vận hành sẽ bắt đầu chêm, lật, và bù trừ theo cảm giác.
Bây giờ anh ta trông có vẻ không ổn định.
Thực ra điều không ổn định chính là khả năng của máy trong việc khớp với hình học của chi tiết. Chúng ta đang ném những người vận hành giỏi vào "thùng rác đổ lỗi" khi giới hạn nằm ở cơ khí, chứ không phải con người.
Trước khi bạn lên lịch thêm đào tạo, hãy tự hỏi: gói trục của máy bạn có thực sự phù hợp với chi tiết phức tạp nhất không?

Hãy công bằng. Bộ điều khiển kỹ thuật số thực sự làm thay đổi vài thứ. Thiết lập nhanh hơn. Lưu chương trình. Độ lặp của thước chặn sau ở trục X có thể chặt hơn tới phần trăm milimet. Máy dùng servo có thể giảm tiêu thụ năng lượng. Đó là những lợi ích thực tế.
Nhưng đây là điều thường không thay đổi: số lượng và tính độc lập của các trục vật lý.
Nếu máy cũ của bạn về cơ bản chỉ có một trục cần ép và một thước chặn sau đơn giản, còn máy “CNC” mới vẫn thiếu những Y1/Y2 ngón Z độc lập hoặc có thể điều chỉnh, thì khả năng kết cấu vẫn như cũ. Bạn đã cải thiện việc giao tiếp với máy. Bạn chưa mở rộng khả năng hiệu chỉnh vật lý của nó.
Đó là sự khác biệt giữa việc sơn lại máy ép và nâng cấp khung. Một cái trông hiện đại hơn. Cái kia giữ được độ chính xác.
Vì vậy, khi các lần uốn không nhất quán vẫn tồn tại sau khi nâng cấp màn hình cảm ứng, sự thay đổi tư duy là: ngừng hỏi về độ “thông minh” của giao diện, và bắt đầu hỏi liệu cấu hình trục có phù hợp với hình học mà bạn đang cố ép qua nó hay không.
Câu hỏi tiếp theo là không thể tránh khỏi: điều gì xảy ra khi Y1/Y2 thực sự di chuyển độc lập — và điều đó thay đổi điều gì trên một lần uốn dài, khó chịu?
Hãy tưởng tượng một kênh dài 36 inch với hai tai gắn lệch — tai trái ngắn, tai phải dài. Trên thước chặn sau 3 trục (X và R nằm phía sau Y1/Y2), cả hai ngón chặn đều nằm trên cùng một thanh Z. Bạn thực hiện lần uốn đầu tiên ổn. Lần thứ hai? Tai phải va vào ngón chặn; phía trái thì lơ lửng trong không khí. Người vận hành nới lỏng kẹp, trượt một ngón bằng tay, siết lại, rồi nhìn bằng mắt để kiểm tra độ vuông.
Thời gian chu kỳ vừa tăng gấp đôi. Quan trọng hơn, khả năng lặp lại vừa chết.
Đó là nơi sự khác biệt thực sự xuất hiện. Một hệ thống 3 trục cho bạn độ sâu (X) và độ cao (R) có thể lập trình. Với các chi tiết đối xứng, như vậy là đủ. Thước chặn sau tham chiếu cả hai bên như nhau, thanh trượt đi xuống dưới Y1/Y2, và mọi thứ diễn ra tốt đẹp. Nhưng ngay khi hình học bên trái và bên phải khác nhau, một thanh Z chung buộc phải thỏa hiệp. Bạn không còn đang điều khiển vị trí; bạn đang thương lượng nó.
Một thước chặn sau 6 trục—X, R, Z1/Z2, cộng với việc độc lập Y1/Y2 ở phía trước—cho phép mỗi ngón di chuyển ngang riêng biệt. Giờ đây, tab bên trái có điểm tham chiếu riêng, tab bên phải có điểm tham chiếu riêng, và máy không còn yêu cầu người vận hành giả vờ độc lập bằng cờ lê nữa. Hình học được khớp bằng thép, không phải bằng hy vọng.
Đây là giới hạn cứng mà hầu hết các xưởng không thấy trước: khi chi tiết của bạn yêu cầu đo độc lập trái-phải, một bộ điều khiển không có khả năng lập trình Z1/Z2 không phải là “đơn giản hơn.” Nó về cấu trúc không thể lặp lại công việc mà không có sự can thiệp của con người.
Và sự can thiệp của con người chính là biến động.
Hãy nói về tải trọng, không phải lý thuyết.
Bạn đặt độ cao R cho một mép thép mềm dày 1/4 inch. Trông hoàn hảo khi không tải. Dưới 80 tấn trên một đoạn uốn dài, tấm thép bị uốn cong, các ngón chặn sau chịu lực hướng lên, và chi tiết hoặc nâng lên hoặc đâm xuống tùy nơi nó được đỡ. Nếu R được đặt một lần bằng cách điều khiển thủ công và cho là xong, thì độ võng đó sẽ không được hiệu chỉnh động.
Độ lệch góc theo sau đó.
Trong một thiết lập X+R cơ bản, người vận hành điều chỉnh bằng cách đẩy nhẹ R giữa các lần hoặc nâng chi tiết bằng tay trong khi uốn. Điều đó thay đổi cách lực truyền vào vai khuôn. Và một khi đường truyền lực đó thay đổi, Y1/Y2 có thể giữ thanh trượt song song cả ngày mà vẫn tạo ra góc mép không đều vì vật liệu không tựa theo cùng một cách hai lần.
Đây không phải là sự nhầm lẫn phần mềm. Đây là sự bất ổn tham chiếu cơ học.
Tôi đã chứng kiến các xưởng cố gắng sửa dao động góc nửa độ bằng cách hiệu chuẩn lại độ uốn (trục V) khi vấn đề thực sự là độ cao thước chặn sau tương tác với độ võng của chi tiết. Họ đang tinh chỉnh thanh trượt trong khi chi tiết đang xoay trên một ngón chặn không được đỡ vững. Điều đó giống như phân loại các tấm phôi tốt vào thùng phế liệu chỉ vì thước chặn của máy cắt bị lỏng—bạn đang đổ lỗi cho vết cắt trong khi điểm tham chiếu đã dịch chuyển.
Vì vậy, đúng vậy, Y1/Y2 sự độc lập khắc phục độ nghiêng của thanh trượt. Nhưng nếu không có X và R ổn định, có thể lập trình—và cuối cùng Z1/Z2—bạn vẫn đang đưa các điều kiện không nhất quán vào một trục ram hoàn toàn song song.
Độ chính xác bắt đầu trước khi mũi đột chạm vào thép.
| Phần kết thúc | Nội dung |
|---|---|
| Tiêu đề | Trục X và R: Tại sao việc điều chỉnh độ cao thủ công lại phá hoại độ chính xác của góc uốn dưới tải |
| Giới thiệu | Hãy nói về tải trọng, không phải lý thuyết. |
| Kịch bản tải trọng | Bạn đặt độ cao R cho một mép thép mềm dày 1/4 inch. Trông hoàn hảo khi không tải. Dưới 80 tấn trên một đoạn uốn dài, tấm thép bị uốn cong, các ngón chặn sau chịu lực hướng lên, và chi tiết hoặc nâng lên hoặc đâm xuống tùy nơi nó được đỡ. Nếu R được đặt một lần bằng cách điều khiển thủ công và cho là xong, thì độ võng đó sẽ không được hiệu chỉnh động. |
| Vấn đề phát sinh | Độ lệch góc theo sau đó. |
| Bù trừ của người vận hành | Trong một thiết lập cơ bản X+R, người vận hành bù trừ bằng cách điều chỉnh R giữa các lần đột hoặc bằng cách nâng phần chi tiết lên trong quá trình uốn. Điều đó thay đổi cách lực truyền vào vai khuôn. Và một khi đường truyền lực đó thay đổi, Y1/Y2 có thể giữ trục ram song song suốt cả ngày mà vẫn tạo ra các góc gập không đồng nhất vì vật liệu không được định vị giống nhau hai lần. |
| Nguyên nhân gốc rễ | Đây không phải là sự nhầm lẫn phần mềm. Đây là sự bất ổn tham chiếu cơ học. |
| Biện pháp khắc phục bị chẩn đoán sai | Tôi đã chứng kiến các xưởng cố gắng sửa dao động góc nửa độ bằng cách hiệu chuẩn lại độ uốn (trục V) khi vấn đề thực sự là độ cao thước chặn sau tương tác với độ võng của chi tiết. Họ đang tinh chỉnh thanh trượt trong khi chi tiết đang xoay trên một ngón chặn không được đỡ vững. Điều đó giống như phân loại các tấm phôi tốt vào thùng phế liệu chỉ vì thước chặn của máy cắt bị lỏng—bạn đang đổ lỗi cho vết cắt trong khi điểm tham chiếu đã dịch chuyển. |
| Kết luận | Vì vậy, đúng là sự độc lập của Y1/Y2 loại bỏ độ nghiêng của ram. Nhưng nếu không có X và R ổn định, có thể lập trình được—và cuối cùng là Z1/Z2—bạn vẫn đang đưa các điều kiện không nhất quán vào một trục ram hoàn toàn song song. |
| Tuyên bố kết thúc | Độ chính xác bắt đầu trước khi mũi đột chạm vào thép. |
Hãy thực hiện bài kiểm tra này trong đầu bạn.
Lấy một tấm phẳng. Thêm một gờ ở giữa. Máy định vị hậu 3 trục xử lý nó tốt.
Bây giờ dịch gờ đó sang trái 4 inch. Vẫn có thể xử lý; cả hai ngón tay đều tham chiếu cùng một cạnh.
Giờ hãy thêm một gờ trả về chỉ ở phía bên phải. Đột nhiên, một ngón tay cần tránh phần gập đã hình thành trong khi ngón kia phải vẫn sát cạnh. Với dầm Z dùng chung, bạn hoặc rút cả hai ngón, hoặc không rút ngón nào. Nếu rút cả hai, bạn mất điểm tựa ở một bên. Nếu giữ cả hai tiến lên, một bên sẽ va chạm.
Đó chính là khoảnh khắc Z1/Z2 không còn là tiện ích nữa mà trở thành yêu cầu bắt buộc.
Các xưởng đôi khi tranh luận rằng hệ thống 3+1—Y1/Y2, X, và hệ thống bù cong—đáp ứng “hầu hết công việc”. Họ đúng với các giá đỡ và kênh đối xứng. Nhưng khi chi tiết bao gồm các độ lệch, mép gập kép hoặc các lần uốn theo giai đoạn làm thay đổi cạnh tham chiếu có sẵn trong chuỗi, thì việc định vị ngang độc lập chính là thứ giữ cho kiểm soát độ sâu ổn định từ lần uốn thứ nhất đến thứ tư.
Có thêm một điểm nữa. Một số hệ thống cung cấp Delta X—độ sâu độc lập cho mỗi ngón. Nghe có vẻ mạnh mẽ. Thực sự đúng vậy. Nhưng nếu bộ điều khiển không đồng bộ hóa Delta X với Z1/Z2 và Y1/Y2, bạn có thể tạo ra sự lệch chéo trong một chuỗi uốn nhiều lần. Một ngón di chuyển sớm, ngón kia chậm hơn, đầu chày vẫn song song, và chi tiết bị xoắn vì các điểm tham chiếu của bạn không được phối hợp.
Các trục không giúp ích gì nếu chúng không di chuyển đồng bộ.
Vì vậy, đây là ngưỡng thực tế: nếu bản vẽ khiến bạn phải nghĩ, “Tôi chỉ cần trượt ngón này ra khỏi đường cho lần uốn này,” thì bạn đã bước vào Z1/Z2 lãnh thổ đó dù bạn có dự trù ngân sách cho nó hay không.
Bỏ qua điều đó, và bạn đang tự nguyện chấp nhận sự không nhất quán.
Tôi đã thấy trường hợp cực đoan ngược lại.
Một xưởng nâng cấp lên đầy đủ các trục X, R, Z1/Z2, thậm chí cả Delta X. Sáu trục trong bảng thông số. Màn hình cảm ứng màu lớn. Tuần đầu tiên, quá trình đưa về vị trí gốc còn mất nhiều thời gian hơn cả uốn vì trục X chờ R xong, R lại chờ Z1/Z2 tìm công tắc giới hạn, và một trục sẽ báo lỗi nếu trục khác chạm hành trình sớm.
Giờ đây, độ phức tạp trở thành nút thắt cổ chai.
Trên một số hệ thống, trình tự tham chiếu được xâu chuỗi: Z1/Z2 phải đưa về 0 trước khi R di chuyển; R phải thông đường trước khi X hoàn tất. Nếu một ngón chạm giới hạn quá sớm—ví dụ một chi tiết dài cần phải dịch ngang bất thường—thì toàn bộ cơ cấu chặn sau sẽ tạm dừng. Việc sản xuất trở nên chậm hơn so với máy 3 trục cũ.
Điều đó không phải là lập luận chống lại việc có thêm trục. Nó là minh chứng ngược cho luận điểm của bài viết: khả năng phần cứng chỉ cải thiện độ chính xác khi bộ điều khiển thật sự có thể tính toán, mô phỏng và phối hợp các trục đó một cách thông minh.
Nếu không, bạn chỉ đang chồng thêm các bộ phận chuyển động mà không có nhạc trưởng.
Nhiều trục hơn mở rộng phạm vi hình học bạn có thể đạt được. Phối hợp kém lại thu hẹp nó thông qua các dạng lỗi mới—va chạm, di chuyển sai thời điểm, lỗi tham chiếu thể hiện bằng sản phẩm bị uốn hỏng thay vì thông báo lỗi.
Nền tảng quan trọng hơn mặt kính trưng bày.
Và một khi bạn thêm Z1/Z2, câu hỏi tiếp theo không phải là liệu bạn có cần chúng không.
Mà là liệu bộ điều khiển của bạn có đủ thông minh để khiến chúng không “đánh nhau” hay không.
Năm ngoái tôi đứng bên cạnh một máy ép phanh năm trục—Y1/Y2, X, R, Z1/Z2 tất cả đều được liệt kê đầy tự hào trên bảng thông số kỹ thuật. Màn hình cảm ứng màu lớn. Lập trình viên tải một công việc uốn giá đỡ với ba bù trừ và một mặt bích hồi. Thay vì nhập mô hình, anh ta gõ chiều dài mặt bích và khấu trừ uốn từng dòng từ bản in được dán vào khung bên. Khi lần uốn thứ ba bị ngắn 0,7 mm, anh ta không đổ lỗi cho các trục. Anh ta gõ lại độ sâu.
Đó là đường phân chia. Không phải là có bao nhiêu động cơ gắn phía sau. Mà là liệu bộ điều khiển có thể lấy hình dạng hình học của chi tiết và chuyển nó thành chuyển động phối hợp của các trục mà không cần con người phải dịch trước hay không.
Các trục cho bạn tự do về vật lý. Phần mềm quyết định liệu sự tự do đó có trở thành chuyển động đồng bộ hay chỉ là thêm nhiều cách để sai.
Nếu bộ điều khiển của bạn xử lý hình học như một bài toán máy tính thay vì một mô hình, bạn không vận hành một hệ thống phối hợp. Bạn đang vận hành một bài kiểm tra trí nhớ với sự hỗ trợ của servo.
Và trí nhớ không phải là một hệ thống điều khiển.
Hãy tưởng tượng một chiếc hộp bốn lần uốn với hai mặt bích không bằng nhau và một mép gấp. Trên bộ điều khiển nhập theo từng bước, người vận hành nhập vật liệu, độ dày, V-die, sau đó gõ từng kích thước mặt bích thủ công. Bộ điều khiển tính toán độ sâu uốn từ bảng hệ số K. Nghe có vẻ ổn—cho đến khi lần uốn thứ hai thay đổi cạnh tham chiếu. Giờ thì Z1/Z2 phải định vị lại một cách độc lập, X phải tham chiếu đến một mặt khác, và bộ điều khiển không có nhận thức về hình dạng 3D đang phát triển. Nó chỉ biết các con số theo trình tự.
Vì vậy người vận hành phải bung mô hình bằng trí óc. Anh ta quyết định cạnh nào trở nên chính sau mỗi lần ép. Anh ta chọn khi nào nên rút một ngón Z và giữ ngón kia chặt. Nếu anh ta đánh giá sai chuyển tiếp đó một milimét, Y1/Y2 vẫn sẽ giữ đầu ép song song—nhưng chúng sẽ ép lên một chi tiết bị đặt sai vị trí.
Đó là cách bạn có thể kết thúc với một đống chi tiết đều sai lệch một cách nhất quán. Giống như ném các phôi tốt vào thùng phế liệu vì ai đó đọc nhầm điểm gốc của thước đo sau, máy đã làm chính xác những gì nó được yêu cầu—chỉ không phải những gì chi tiết cần.
Giờ hãy so sánh điều đó với khả năng bung mở 3D nguyên bản. Bộ điều khiển nhập mô hình rắn, tính toán mẫu phẳng, mô phỏng thứ tự uốn và phân bổ chuyển động cho các trục—X, R, Z1/Z2, và Y1/Y2—dựa trên hình học thay đổi của chi tiết. Nó “biết” khi nào một mặt bích chắn ngón. Nó “biết” khi nào cần dịch chuyển vị trí ngang trước khi đầu ép hạ xuống. Người vận hành không dịch hình học; anh ta đang xác minh một mô phỏng.
Nhưng có một ranh giới rõ ràng mà hầu hết các xưởng đều bỏ qua: bộ điều khiển chỉ có thể điều khiển các trục mà nó thực sự có. Nếu phần mềm bung mô hình một cách tuyệt đẹp nhưng bạn không có khả năng điều khiển độc lập Z1/Z2, nó vẫn không thể đỗ một ngón và giữ ngón kia tiếp xúc. Nhận thức hình học mà không có sự độc lập vật lý chỉ là một bản xem trước đẹp hơn.
Vì vậy, câu hỏi thực sự không phải là “Nó có đồ họa 3D không?” mà là “Bộ điều khiển có thể chuyển đổi hình học 3D thành chuyển động trục độc lập, đồng bộ mà không cần con người dịch thuật không?”
Nếu không thể, bạn vẫn đang lập trình các đoạn gấp. Bạn chưa thực sự lập trình chi tiết.
Tôi đã bấm giờ việc này nhiều hơn một lần. Một chi tiết có độ phức tạp trung bình—sáu lần gấp, hai lần thay dụng cụ, một lần trả vị trí khó xử—mất khoảng 20 đến 30 phút để lập trình trực tiếp trên máy nếu bạn nhập tọa độ thủ công và kiểm tra khoảng hở bằng các bước di chuyển chậm. Đó là với một người vận hành có kinh nghiệm.
Giờ hãy tưởng tượng công việc đó được lập trình ngoại tuyến. Thư viện dụng cụ đã tải xong. Hình học máy đã được xác định. Phần mềm mô phỏng hành trình của bàn ép, R dịch chuyển chiều cao, Z1/Z2 rút lùi và phát hiện va chạm ngón kẹp trước khi thép chạm vào khuôn. Khi tệp đến máy ép, chuyển động thực đầu tiên diễn ra với tốc độ sản xuất.
Sự khác biệt không phải là ở mức tiện lợi. Mà là ở việc kiểm soát lỗi.
Tại bàn điều khiển, việc phát hiện va chạm diễn ra một cách vật lý. Bạn di chuyển thủ công Z1/Z2, bạn hạ xuống Y1/Y2, bạn quan sát xem có vướng hay không. Nếu bỏ sót, bạn làm trầy ngón kẹp hoặc làm hỏng chi tiết. Mỗi lần suýt va chạm lại khuyến khích kiểu suy nghĩ “cứ cho cả hai ngón kẹp đủ hở trong bước này”. Đó là cách mà sự hỗ trợ bên bị mất và chiều dài cánh gấp bị sai lệch.
Mô phỏng ngoại tuyến chuyển rủi ro đó lên giai đoạn đầu. Bộ điều khiển tính toán xem R phải nâng lên trước khi X tiến tới. Nó sắp xếp các chuyển động sao cho các trục không phải chờ nhau một cách không cần thiết. Sự phối hợp đó rất quan trọng vì khi các trục về gốc hoặc tái định vị sai thứ tự, người vận hành bắt đầu ghi đè tự động hóa để “tiết kiệm thời gian.” Lúc đó chuyển động đồng bộ hóa biến thành ứng biến.
Và ứng biến thì tốn kém.
Một giao diện bóng bẩy nhưng vẫn cần phát hiện va chạm trực tiếp chỉ là lớp kính trưng bày đặt trên khung yếu. Trông hiện đại. Nhưng hoạt động như thời trung cổ.
Nếu quy trình làm việc của bạn phụ thuộc vào việc bắt lỗi trong khi bàn ép đang di chuyển, bạn đang trả tiền cho sự phức tạp hai lần—một lần ở thời gian lập trình, một lần ở phế phẩm.
Tôi đã bước vào một xưởng có hai máy ép giống hệt nhau. Cùng lực ép. Cùng Y1/Y2, X, R, Z1/Z2 cấu hình. Một máy lấy công việc từ máy chủ dùng chung—mô hình 3D, thiết lập dụng cụ, trình tự gấp, vị trí trục đều được nhúng sẵn. Máy còn lại thì dựa vào bảng hướng dẫn thiết lập viết tay dán lên tấm chắn.
Sau ba tuần lặp lại đơn hàng, chiếc máy đầu tiên giữ được độ sai lệch của mặt bích trong phạm vi dung sai thông thường mà không cần chỉnh độ sâu lần nào. Chiếc máy thứ hai thì công nhân phải điều chỉnh độ sâu uốn ở lần chạy thứ ba vì “vật liệu có cảm giác khác.”
Vật liệu không thay đổi. Tham chiếu nhất quán mới thay đổi.
Khi dữ liệu chảy trực tiếp từ mô hình đến bộ điều khiển, X các vị trí không bị diễn giải lại. R Chiều cao không bị ước đoán từ trí nhớ. Z1/Z2 Độ lệch ngang không bị quyết định ngẫu nhiên. Mỗi chuyển động theo trục đều được tính toán từ cùng một nguồn hình học mỗi lần. Đó là sự chắc chắn cơ học.
Khi dữ liệu nằm trong đầu người vận hành, những sai lệch nhỏ bắt đầu len lỏi. Ai đó quyết định rút cả hai ngón thay vì một. Người khác lại để R cao hơn 2 mm để dễ nạp phôi. Nếu Y1/Y2 không thể tự điều chỉnh áp lực hai bên, người vận hành bắt đầu lót, lật, bù trừ theo cảm giác. Tính lặp lại trở thành một đặc điểm cá nhân.
Đó là cách bạn có một pallet hoàn hảo và pallet tiếp theo thì suýt thành phế phẩm—không phải vì máy thay đổi, mà vì lớp chuyển đổi thay đổi.
Luồng dữ liệu tự động không khiến máy uốn của bạn thông minh hơn. Nó loại bỏ sự diễn giải lại của con người giữa hình học và chuyển động. Và khi các trục độc lập thực thi các vị trí đã được tính sẵn ở mỗi chu kỳ, độ biến thiên không còn nhiều chỗ để ẩn náu.
Sự thật thẳng thắn là: nếu bộ điều khiển của bạn không thể mang dữ liệu hình học từ bản thiết kế đến chuyển động đồng bộ Y1/Y2, X, R, và Z1/Z2 mà không phụ thuộc vào trí nhớ của người vận hành, thì bạn không sở hữu một hệ thống chính xác—bạn đang sở hữu một “hộp gợi ý” có gắn thủy lực.
Bạn muốn biết cách chọn một bộ điều khiển mang lại điều khiển trục đồng bộ dựa trên hình học, chứ không phải một bản hoạt hình bóng bẩy trên màn hình cảm ứng màu cỡ lớn.
Hãy bắt đầu từ thùng phế phẩm.
Không phải tờ quảng cáo. Không phải mẫu thử mà nhân viên bán hàng uốn một lần trong phòng trưng bày. Mà là mẻ hàng bị loại thật sự từ tháng trước. Trải các chi tiết ra bàn. Quan sát mẫu lỗi như thể bạn đang đọc một hiện trường vụ án. Góc có bị lệch từ trái sang phải không? Chiều dài mặt bích có không đồng đều giữa các lần uốn không? Người vận hành có phải xoay chi tiết giữa chu kỳ vì hệ thống chặn sau không hỗ trợ được hình học đó không?
Đây không phải là hoài niệm. Đây là quá trình giải ngược.
Nếu 50 sản phẩm lỗi gần đây đều có cùng một triệu chứng, thì triệu chứng đó chỉ ra một trục bị thiếu hoặc không được tận dụng, hoặc một giới hạn cơ học mà không bộ điều khiển nào có thể che giấu. Hãy coi đống phế liệu như nhật ký kiểm toán được viết bằng thép. Thùng phế phẩm là cố vấn duy nhất trong xưởng không bao giờ nói dối.
Nếu bạn không để các bộ phận bị loại hướng dẫn bảng thông số kỹ thuật của mình, thì bạn đang mua kính mặt tiền và hy vọng nó sẽ chống đỡ được cả tòa nhà.
Độ lệch góc trên toàn bộ chiều rộng? Câu hỏi đầu tiên: có phải Y1/Y2 đang điều khiển độ sâu của chày một cách độc lập, hay bạn đang chạy ở chế độ ràng buộc và phải chỉnh bằng miếng chêm?
Bởi vì đây là sự thật cơ học: Y1/Y2 độc lập kiểm soát độ song song trái-phải của đầu ép. Điều đó ảnh hưởng đến độ nhất quán của góc uốn trên toàn bộ chi tiết. X, R, Z1/Z2 không tác động đến góc; chúng kiểm soát vị trí chi tiết, chứ không phải độ sâu chày đâm xuống. Nếu bạn đổ lỗi cho bộ điều khiển vì sai lệch góc trong khi bàn ép bị uốn cong và không có bù độ võng, thì đó là vấn đề của khung máy, không phải của phần mềm.
Nâng cấp màn hình sẽ không làm thẳng thép được.
Giờ hãy xem đến các chiều dài mép gấp không đều. Đó là độ chính xác lặp lại của trục X. Các trục X dẫn động bằng servo hiện đại có thể định vị trong sai số vài phần trăm milimét. Nếu chiều dài mép gấp thay đổi ngẫu nhiên, thì hoặc trục X thiếu độ chính xác servo, hoặc người vận hành đang nhập lại con số thay vì chạy chương trình đã lưu. Nếu chi tiết không đối xứng và một bên cần điểm chặn khác bên kia, X1/X2 độc lập có thể giúp giảm việc định vị lại thủ công — nhưng đó là tối ưu quy trình, không phải cải thiện độ chính xác góc.
Lỗi khác. Trục khác.
Và khi người vận hành phải xoay chi tiết giữa chừng vì một ngón chặn sau vướng vào mép gấp hồi, đó là vấn đề của Z1/Z2. Chuyển động ngang độc lập cho phép một ngón chặn rút lại trong khi ngón kia vẫn giữ. Nếu không có điều đó, người vận hành trở thành trục di chuyển — nâng, lật, phán đoán. Đó là hình học được dịch bằng trí nhớ cơ bắp.
Nếu Y1/Y2 không thể tự động hiệu chỉnh áp lực hai bên, người vận hành sẽ bắt đầu chêm, lật, và bù trừ theo cảm giác.
Đây là bộ lọc dành cho bạn: với mỗi lô bị loại, hãy chỉ ra trục nào lẽ ra đã ngăn được điều đó. Nếu bạn không thể nêu ra, thì bạn không cần thêm trục — bạn cần sử dụng tốt hơn những trục hiện có.
Tôi đã thấy những máy tám trục hoạt động chẳng khác gì máy hai trục vì không ai được đào tạo để lập trình chúng.
Một hệ thống 4 trục mà chỉ chạy ở chế độ cơ bản thì không khác gì một máy đơn giản hơn — ngoại trừ hóa đơn bảo trì. Thêm trục chỉ cải thiện độ chính xác khi hình học yêu cầu chuyển động độc lập và xưởng thực sự lập trình cho chuyển động đó.
Hãy lấy một giá đỡ sản xuất điển hình: độ sâu mép gấp đồng nhất, không có hồi bất đối xứng, chiều rộng trung bình. Một bộ Y1/Y2, X và R xử lý được việc đó cả ngày. Servo X cho chiều dài mép gấp lặp lại nhất quán. R điều chỉnh độ cao dọc của ngón chặn cho các chi tiết dạng hộp. Y1/Y2 giữ cho đầu ép song song. Với hầu hết các công việc sản xuất hàng loạt, đó là điểm cân bằng hoàn hảo giữa độ chính xác và độ phức tạp.
Giờ hãy chuyển sang các tấm lớn có độ sâu mép gấp khác nhau ở mỗi đầu. X1/X2 và R1/R2 độc lập cho phép bạn định vị cả hai bên trong một chu trình. Điều đó giảm thao tác. Tiết kiệm thời gian. Nhưng nó không tự động siết chặt dung sai góc; nó chỉ loại bỏ các bước định vị lại, nơi lỗi con người dễ phát sinh.
Tiện lợi và chính xác là họ hàng, không phải sinh đôi.
Và đừng nhầm lẫn giữa bù trừ độ võng của bàn (thường được gọi là trục V hoặc hệ thống crowning) với trí tuệ của bộ điều khiển. Nếu trung tâm của lần uốn dài của bạn bị hở vì bàn bị cong dưới tải, thì dù có thêm bao nhiêu trục chặn sau (backgauge) cũng không thể khắc phục được. Đó là vấn đề của kết cấu thép, không phải phần mềm.
Thêm nhiều trục mà không có nhu cầu hình học thực tế thì cũng như gắn thêm một máng nữa vào thùng phế liệu — nó không giảm lượng phế liệu, chỉ sắp xếp lại thôi.
Hãy mua thêm trục để giải quyết những mâu thuẫn hình học cụ thể, không phải để gây ấn tượng với khách tham quan.
Các tờ giới thiệu bán hàng liệt kê các trục như liệt kê công suất động cơ. Y1/Y2, X, R, Z1/Z2, có thể cả các cặp trục độc lập khắp nơi. Nghe thật ấn tượng.
Nhưng có một ranh giới rõ ràng mà hầu hết các xưởng bỏ qua: bộ điều khiển chỉ có thể điều khiển những trục mà máy thực sự có — và chỉ theo cách mà chi tiết của bạn yêu cầu.
Vì vậy, hãy đảo ngược quy trình mua hàng.
Thay vì hỏi, “Cấu hình trục tối đa hiện có là gì?” hãy hỏi, “Năm tới chúng ta đang báo giá cho những công việc nào mà hiện tại vẫn phải từ chối hoặc gặp khó khăn?” Hãy lấy các bản vẽ đó ra. Tìm những yêu cầu hình học: gờ không đối xứng, hộp cao, tấm dài với dung sai góc chặt trên toàn chiều rộng, các lần uốn nhiều giai đoạn nơi việc cản trở ngón tay là không thể tránh khỏi.
Sau đó hãy liên kết hình học với mức độ độc lập.
Chi tiết dài, yêu cầu dung sai nghiêm ngặt? Hãy ưu tiên khả năng Y1/Y2 đồng bộ hóa và điều khiển crowning mạnh mẽ. Hộp sâu với chiều cao gờ biến thiên? R và có thể cả R1/R2 độc lập là quan trọng. Chi tiết lớn, không đối xứng với các điểm tựa thay đổi? Z1/Z2 mới thực sự phát huy giá trị. Công việc đa dạng, sản lượng thấp nơi lỗi cài đặt chiếm ưu thế? Hãy đầu tư vào bộ điều khiển có thể chuyển đổi mô hình 3D trực tiếp thành chuyển động phối hợp của Y1/Y2, X, R, Z1/Z2 mà không cần nhập lại thủ công.
Giờ đây bạn không còn mua một màn hình nữa. Bạn đang mua phần kết cấu thép làm nền tảng.
Phần ít ai nhận ra là: độ chính xác không đến từ tổng số lượng trục — mà đến từ việc khớp điều khiển trục độc lập với độ phức tạp hình học của chi tiết và thực sự sử dụng sự độc lập đó trong chuyển động được lập trình. Bất cứ thứ gì vượt quá mức đó chỉ là cho đẹp mắt.
Lần tới khi bạn bước vào phòng trưng bày và thấy màn hình sáng bóng đó phát sáng chào bạn, đừng chạm vào màn hình.
Hãy hỏi xem trục bị thiếu nào có thể đã cứu được lô hàng bị loại lần trước của bạn — và liệu nhóm của bạn có biết cách làm cho nó vận hành hay không.


















