

Продавец провёл пальцем по 19-дюймовому сенсорному экрану так, будто представлял новый пикап. Крупные иконки. Глянцевые градиенты. “Полный ЧПУ”, — сказал он.
Двумя неделями позже я наблюдал, как лист нержавейки толщиной 10 калибров соскользнул в бак для лома, потому что задний упор и ползун так и не смогли договориться, где им встретиться.
Вот на этот зазор я хочу, чтобы вы посмотрели.
Зайдите в достаточное количество цехов, и вы услышите: “Это же ЧПУ. Мы в порядке”. Словно сама надпись гарантирует точность.
Но я видел средний коэффициент использования листогибочных прессов около 12,9 %, в то время как предприятия из верхнего квартиля превышают 34 %. Оборудование одно и то же. Та же тоннажная категория. Разница не в цвете интерфейса. Она в том, предотвращает ли логика управления ошибку при первом гибе — или вежливо ждёт, пока она произойдёт на производстве.
Сенсорный экран не спасёт вас от утилизации листа из нержавейки толщиной 10 калибров. Это делает логика управления.
Так что же скрывается за этими наклейками “Совместимо с ЧПУ”?
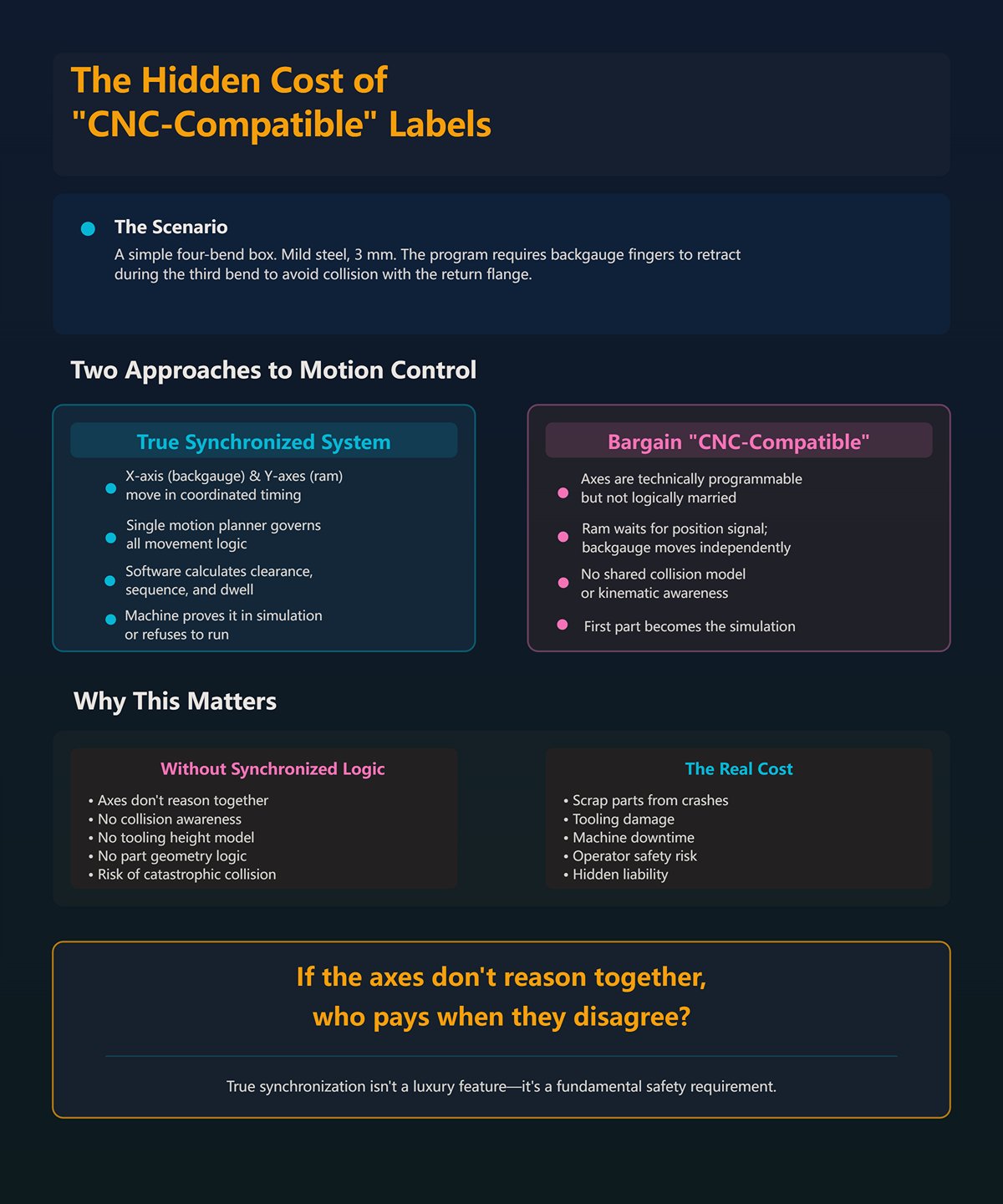
Представьте простой короб с четырьмя гибами. Ничего особенного. Обычная сталь, 3 мм. Программа предусматривает, что пальцы заднего упора должны отойти во время третьего гиба, чтобы избежать столкновения с отгибом.
В настоящей синхронизированной системе ось X (задний упор) и оси Y (гидроцилиндры ползуна) движутся согласованно, под управлением одного планировщика движения. Программа вычисляет зазор, последовательность и выдержку до начала хода ползуна. Машина либо подтверждает это в симуляции, либо отказывается запускаться.
В бюджетном контроллере “Совместимо с ЧПУ” оси формально программируются, но логически не связаны. Ползун ждёт сигнала позиции. Задний упор двигается по собственной инструкции. Нет общей модели столкновений. Нет кинематического понимания высоты инструмента или геометрии детали.
Результат? Первая деталь становится симуляцией.
Если оси не «мыслят» вместе, кто оплачивает, когда они расходятся?
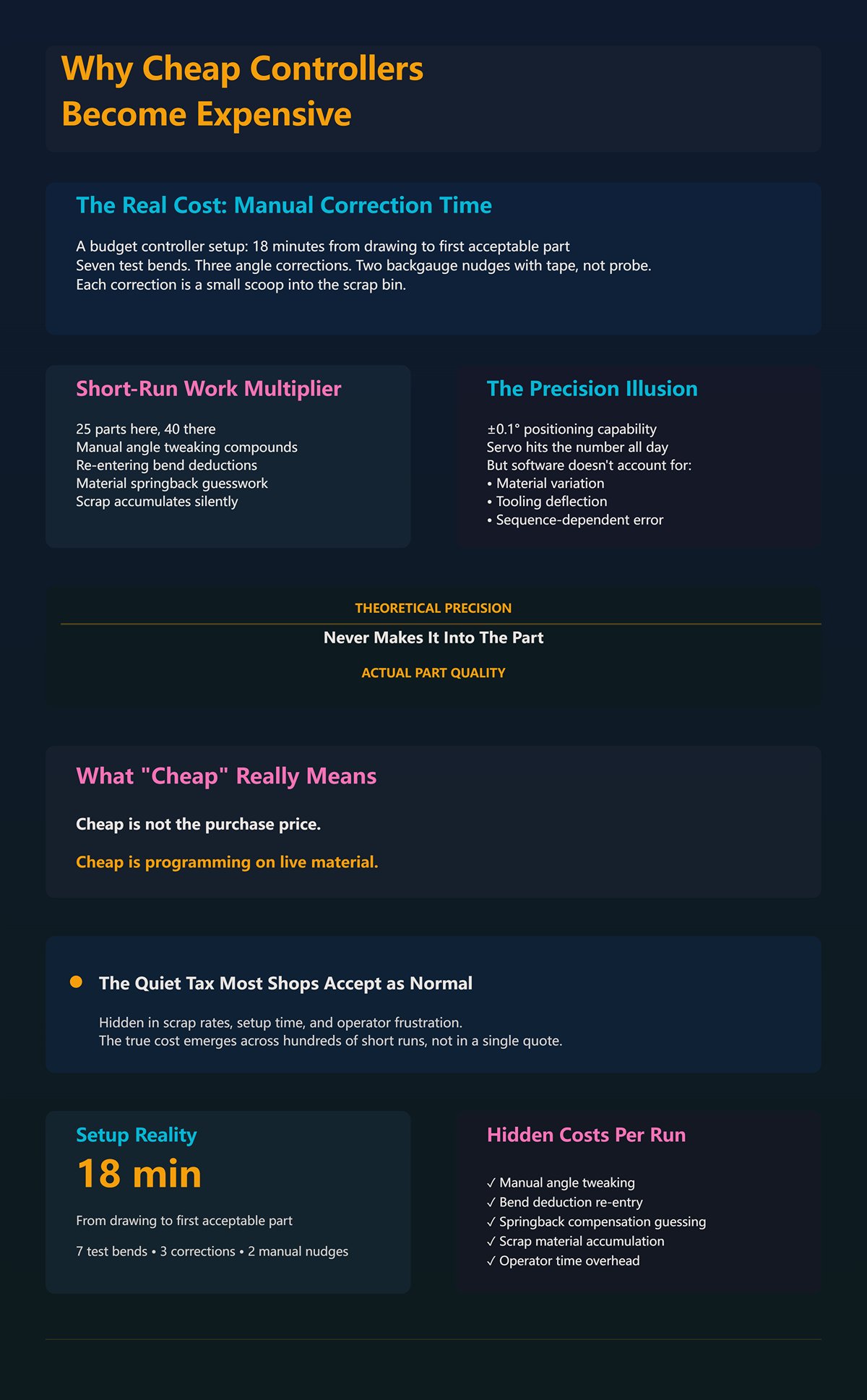
Однажды я засёк время наладки на бюджетном контроллере: 18 минут от чертежа до первой приемлемой детали. Семь пробных гибов. Три корректировки по углу. Два сдвига заднего упора, измеренных рулеткой, а не датчиком.
Теперь примените это к мелкосерийному производству — 25 деталей тут, 40 там. Эти “незначительные” коррекции накапливаются. Ручное подгоняние углов. Повторный ввод поправок на гиб, потому что контроллер не умеет компенсировать упругий возврат материала, если оператор не угадает его заранее. Каждая коррекция — небольшой совок в контейнер для лома.
Производители любят цитировать точность ±0,1°. Отлично. Серводвигатель может держать это значение хоть весь день. Но если программа не учитывает вариации материала, прогиб инструмента или ошибку, зависящую от последовательности, эта теоретическая точность никогда не попадёт в деталь.
Дешёвое — это не цена покупки. Дешёвое — это когда программирование выполняется на реальном материале.
Что и приводит к «тихому налогу», который большинство цехов считает нормой.

Во многих цехах первый лист с поддона становится жертвой. Все это знают. Но никто не закладывает это в смету.
Простые контроллеры не имеют надежной офлайн-симуляции или реального обнаружения столкновений. Поэтому оператор становится переводчиком между чертежом и машиной: регулирует глубину с шагом 0,1 мм, на ощупь смещает положение заднего упора, меняет порядок гибов, когда фланец сталкивается с держателем пуансона.
Это не мастерство. Это неоплаченные исследования и разработки.
Интегрированные системы “лазер–гибочный пресс” могут смоделировать весь процесс до того, как отрезан первый лист, выявляя конфликты последовательности заранее. Особенно при разнообразном и индивидуальном производстве именно на этом этапе симуляция должна ловить ошибки. Но когда программное обеспечение останавливается на уровне «позиционирования ЧПУ» и не моделирует реальные движения машины, вы ничего не изменили. Вы просто оцифровали догадки.
Вот на что я хочу, чтобы вы обратили внимание: перестаньте спрашивать, сколько кнопок у контроллера, и начните спрашивать, где произойдет первая ошибка — на светящемся экране или на листе нержавейки $200.
Потому что, как только вы это осознаете, следующий вопрос уже не о экранах.
Он о том, как программное обеспечение управляет каждой движущейся осью.
Несколько месяцев назад я стоял за шестикоординатным прессом, гнувшим лист мягкой стали толщиной 4 мм. На бумаге это был монстр: Y1, Y2, X, R, Z1, Z2. Независимые пальцы. Программируемая компенсация прогиба. Буклет выглядел как спецификация истребителя.
Однако первая деталь все равно получила скручивание на 0,8° по ширине.
Мы поставили индикатор. Ось Y1 опережала Y2 буквально на волосок во время опускания — недостаточно, чтобы вызвать тревогу, но достаточно, чтобы исказить гиб. Задний упор достиг позиции X, но ось R еще не полностью стабилизировалась, когда балка начала движение. Каждая ось по отдельности была “в пределах допуска”. Вместе — выходили из правды.
Вот он, разрыв. Механические ограничения определяются не столько сталью и гидравликой, сколько логикой, которая координирует их движение. Если ваш контроллер воспринимает оси как отдельные поручения, а не как единую скоординированную траекторию, вы работаете не с прецизионным прессом, а с дорогой машиной для угадывания, которая движется очень точно, но в неправильной последовательности.
И именно так ошибки первого гиба минуют блестящие интерфейсы и оказываются в контейнере для лома.
Все зациклены на синхронизации Y1/Y2 — и правильно. Ось Y управляет балкой. Без стабильного, повторяемого управления балкой всё остальное не имеет значения. Одна ось — минимально жизнеспособный пресс.
Но посмотрите, как формуется реальная деталь. Ось X задает глубину фланца. Ось R определяет высоту пальцев относительно матрицы. Оси Z1/Z2 распределяют пальцы для поддержки заготовки. Теперь добавьте отгиб, который требует зазора при третьем гибе.
На правильно интегрированном контроллере эти оси не просто “приходят” в нужные позиции. Планировщик движения рассчитывает временную траекторию: X отводится на 40 мм, пока Y поднимается выше безопасного зазора; R смещается на 12 мм, поддерживая материал при его вращении; пальцы Z перестраиваются между гибами только после того, как балка проходит заданный порог. Всё это управляется общей кинематической моделью высоты инструмента, ширины матрицы и геометрии детали.
Предотвращение столкновений — это не сигнализация, срабатывающая после контакта. Это код, который задает физические ограничения — глубину горловины, длину пуансона, геометрию пальцев — и отказывается выполнять последовательность, их нарушающую.
А теперь представьте типовой контроллер, где оси просто ждут флажков позиции. X достигает координаты. Двигается Y. Без понимания того, что фланец вот-вот проткнет держатель пуансона, потому что программное обеспечение вообще не моделирует этот держатель. Первый лист становится зондом для проверки зазора.
Вот вопрос с избыточными требованиями, который никто не любит: если ваше программное обеспечение не может подтвердить согласованное движение осей в симуляции, зачем добавлять независимые пальцы оси Z? Большее количество осей лишь увеличивает количество точек отказа, если логика не объединяет их в один мозг.
Это подводит нас к части, которую программное обеспечение либо угадывает — либо знает.
Однажды я гнул деталь длиной 1200 мм из нержавеющей стали толщиной 10 калибра с базовой компенсацией прогиба, выставленной на ощупь. Первый удар получился с раскрытием 1,5° по центру. Мы добавили шайбу. Второй удар — сверхкомпенсированный. Третий оказался достаточно близким, чтобы отправить изделие.
Три испытательных образца потеряны.
Компенсация прогиба существует потому, что ползун и стол прогибаются под нагрузкой. Этот прогиб неравномерен; он зависит от распределения усилия по длине. Передовое программное обеспечение не просто позволяет установить число вручную. Оно вычисляет ожидаемый прогиб исходя из длины гиба, предела прочности материала, раскрытия матрицы и целевого угла, а затем задаёт рассчитанную кривую компенсации до того, как ползун коснётся металла.
Та же история с упругим возвратом. Мягкая сталь с пределом 250 МПа ведёт себя иначе, чем нержавейка с 600 МПа. Реальная библиотека материалов хранит предел прочности, коэффициент текучести и эмпирические коэффициенты гибочного вычета. Когда вы выбираете 3 мм нержавейку марки 304, контроллер корректирует глубину проникновения, чтобы достичь 90°, зная, что этот материал расслабится больше, чем A36.
Базовое программное обеспечение? Оно просто просит оператора “скорректировать угол”. Это вежливый способ сказать: согни и посмотри.
Разница проявляется в том, где живёт первая ошибка. С откалиброванной библиотекой материалов и динамической компенсацией прогиба коррекция происходит в вычислениях. Без этого — коррекция происходит в листовом металле.
Но вот ловушка, о которой большинство продавцов умалчивает: цифровой двойник столь честен, насколько точна ваша калибровка. Если ваша таблица усилий неверна или цилиндры компенсации прогиба уводят, симуляция лжёт с полной уверенностью. Так как же понять, что действительно определяет повторяемость?
Я видел задние упоры с заявленной повторяемостью ±0,02 мм. Прекрасное число. Лазерная гравировка. ”Как будто сама наклейка гарантирует точность”.”
Потом цех выполняет гибы с малыми промежутками, меньше чем шесть толщин материала — например, материал 3 мм с отступами 12 мм. Давление в гидросистеме скачет неравномерно по столу. Ползун замедляется, чтобы поддерживать давление возврата. Тайминг оси Y слегка смещается под нагрузкой.
Задний упор может попадать в точку весь день. Если последовательность программы не учитывает динамику давления и порядок гибов, угол всё равно будет плавать.
Повторяемость — это результат работы всей системы, а не характеристика отдельного компонента.
Логика программирования определяет последовательность гибов, чтобы минимизировать накопленную ошибку. Она решает, формировать ли внутренние фланцы первыми для стабилизации заготовки; разбивать ли длинный гиб на этапы для контроля прогиба; переставлять ли пальцы оси Z для поддержания распределения веса перед критическим гибом. Эти решения влияют на стабильность углов больше, чем то, как шлифовался или прокатывался шарико-винтовой привод упора.
Так что, когда кто-то хвастается семью управляемыми осями, я задаю один вопрос: синхронизирует ли контроллер их под нагрузкой, используя реальные данные о материале, и подтверждает ли последовательность до того, как ползун опустится?
Потому что если нет, физические пределы машины определяются не сталью и гидравликой.
Они определяются первой ошибкой, которую вы обнаружите после того, как пуансон коснётся металла.
И эта ошибка должна была умереть в симуляции.
Хотите убедиться на практике, что контроллер обеспечивает синхронизированную, проверенную симуляцией повторяемость?
Попросите его ошибиться раньше, чем это сделаете вы.
Не на машине. В офисе. В цифровой модели, которая знает длину вашего пуансона, плечи матрицы, глубину зева, пальцы заднего упора и ту самую нержавейку 3 мм, о которой вы уверены, что она “ведет себя примерно так же, как в прошлый раз”. Если программное обеспечение не может предсказать столкновение, проблему с зазором или невозможную последовательность гибов до того, как опускается ползун, то вся та интегрированная логика осей, о которой мы только что говорили, всё равно будет проверена по-старинке — жертвуя листом в корзину для отходов.
Это и есть ошибка первого гиба. В каждой работе она есть. Единственный вопрос — где она происходит.
2D- и 3D-симуляции нужны не для красивых экранов. Они нужны, чтобы перенести эту ошибку «вверх по течению», туда, где промахи стоят электроэнергии и кофе, а не листа 10-гейджевой нержавейки и царапины на держателе пуансона. Окупаемость — это не количество кнопок, а то, где случается ваша первая ошибка: в пикселях или в стали.
Так когда же 2D перестает быть достаточным?
Плоский экран не показывает глубину.
Для простых кронштейнов — два гиба, одна смена плоскости — программирование в 2D прямо на консоли работает отлично. Вы вводите длины отбортовок, выбираете матрицу, следуете предложенному контроллером порядку гибов, и если ваш материал в библиотеке описан честно, то вы почти точно попадете с первого раза. Геометрия предсказуема. Зазоры очевидны. Мозг оператора достраивает недостающую третью ось.
Но добавьте три возвратные отбортовки вокруг коробки, добавьте смещение меньше шестикратной толщины материала — и внезапно зазоры перестают быть очевидными. В 2D контроллер показывает профиль каждого гиба по отдельности. То, чего не видно ясно, — это как уже сформированная отбортовка двигается в пространстве при следующем гибе, проходит возле держателя пуансона, насколько близко подходит к зеву машины. Оператор превращается в «движок столкновений».
Это нормально — до тех пор, пока не перестает быть нормально.
Я видел, как хорошие специалисты “гибают в воздухе и наблюдают”, используя этот метод как основную проверку. Они замедляют ползун, держат палец над стопом и позволяют первому листу выступить зондом. Иногда они успевают заметить помеху. Иногда полируют борозду на пуансоне $600. Корзине для отходов всё равно, откуда взялась ошибка — из-за неверных расчетов или отсутствия визуализации.
2D становится узким местом, как только пространственное мышление выходит за пределы того, что один человек способен безопасно смоделировать в уме.
А в цехах с высоким разнообразием заказов это происходит ежедневно.
Вот простая формула, с которой никто не спорит: если пресс-гиб гнет — он зарабатывает. Если он ждет, пока кто-то запрограммирует сложную деталь прямо на консоли — он не зарабатывает.
Автономное программирование переносит работу с геометрией — импорт, развертку, последовательность гибов, выбор инструмента — на рабочую станцию. Пресс-гиб продолжает работать над вчерашним заказом, пока завтрашняя проблема решается в симуляции, связанной с CAD. Когда всё настроено правильно, переналадка сокращается с “дай мне час” до “загрузить программу, установить инструмент, запуск”.”
Это и есть реальная окупаемость.
Я видел, как цехи заявляли примерно на треть больший объем производства при высоком разнообразии и малых партиях, когда OLP было отлажено. Ключевая фраза — «отлажено». Если ваша CAD-система правильно взаимодействует с ПО пресс-гиба, если библиотека инструментов соответствует реальности, если постпроцессор выдает код, который действительно понимает контроллер — тогда да, ошибка первого гиба случается в офисе.
Но вот вопрос о чрезмерной спецификации: создаёте ли вы цифрового двойника, требования которого ваша машина физически не может выполнить?
Попробуйте модернизировать старый гидравлический пресс‑тормоз с неточным обратным связанием по осям и рассчитывайте на жёсткую трёхмерную офлайн‑проверку — вы можете лишь перенести ошибку, а не устранить её. В офисе могут сказать, что последовательность безопасна, но реальная машина с запаздывающей осью или нестабильной реакцией давления расскажет другую историю. Я видел, как проблемы интеграции удваивали время наладки, поскольку программы приходилось редактировать вручную на консоли. В таких случаях обещание “безрисковой симуляции” тихо пополняет ящик с браком другим путём.
OLP окупается, когда цифровая модель и физический пресс говорят на одном языке.
В противном случае вы просто переместили догадки в более удобное кресло.
Настоящее 3D‑моделирование работает с объёмами, а не с линиями.
Оно понимает, что пуансон — это не абстрактная осевая линия, а твёрдое тело с плечами и выборками. Что матрица имеет высоту. Что упоры заднего калибра имеют толщину и крепёжные болты. Когда программа запускает последовательность гибов, она рассчитывает объём, проходимый деталью — пространство, которое она занимает при вращении вокруг радиуса матрицы — и сверяет его со всеми смоделированными компонентами.
Если два твёрдых тела пересекаются в симуляции, программа останавливается.
На один зазубренный инструмент меньше. На одну треснувшую матрицу меньше. На один полдень меньше, потраченный на объяснения начальнику, почему у нового сегментированного пуансона появилось полумесяцем выгнутое пятно.
Но давайте не обманывать себя. Даже хорошее 3D‑обнаружение столкновений имеет слепые зоны. Изменение упругого восстановления может превратить смоделированные 92° в реальные 94°, изменив, как кромка проходит следующий гиб. В некоторых испытаниях оказалось, что часть “оптимальных” смоделированных последовательностей всё же требовала корректировок на производстве, потому что поведение материала выходило за рамки модели. Физика не читает руководство по вашему программному обеспечению.
Так что отличает маркетинговую анимацию от реальной защиты?
Калибровка. Точные библиотеки инструмента. Проверенная геометрия машины. И контроллер, который отказывается выполнять последовательность, нарушающую моделированные ограничения, а не просто вежливо предупреждает и всё равно запускает цикл.
Каждое столкновение, пойманное в 3D, — это деталь, которой не пришлось учить вас уроку на стали.
И когда вы принимаете, что симуляция — это зал суда, где ваш процесс оценивают до контакта с металлом, следующий вопрос становится острее: какие семейства контроллеров действительно исполняют этот вердикт — а какие лишь показывают его блестящими градиентами?
В одном цехе в Индиане, где я работал, стояли два пресса рядом: один с DA‑52S, другой — обновлённый до DA‑66T с полноценным 3D и офлайн‑программированием. Та же работа с нержавейкой толщиной 10 гейджей, тот же набор инструмента. Машина с 52S сделала первую деталь за двенадцать минут — один пробный гиб, корректировка припуска, запуск. Машина с 66T ещё не тронула металл: она всё ещё импортировала STEP‑файл и проверяла зазоры инструмента в симуляции.
К обеду обе производили хорошие детали.
К концу недели только одна отправила что‑то в отходы.
Разница была не в размере сенсорного экрана и не в тех самых блестящих градиентах. Всё решало то, позволяет ли контроллер выполнить последовательность гибов, нарушающую собственную модель столкновений. На 66T, если смоделированная кромка пересекала держатель пуансона, программа просто не запускалась. На 52S оператор всё ещё мог “попробовать медленно”. Принудительное исполнение против визуализации — та граница, где живёт вероятность ошибки первого гиба.
Так где же в иерархии эта граница действительно проходит?
Начнём с DA‑52S. Это 2D‑графический контроллер — надёжный, предсказуемый и огромный шаг вперёд по сравнению с догадками на базе ПЛК. Вы вводите длины отбортовок, углы, материал, инструмент. Он вычисляет глубину хода ползуна и положения заднего упора. Для плоских кронштейнов и простых каналов — быстро. Я видел, как цеха окупали разницу в цене относительно базовых контроллеров за четыре‑шесть месяцев только за счёт уменьшения брака при наладке и снижения зависимости от ведущего сборщика, вручную вводящего каждое перемещение осей.
Если вы весь день гнёте детали в двух плоскостях, 52S держит контейнер для отходов почти пустым.
Но стоит перейти к коробчатым формам с обратными отбортовками, последовательностями подгиба или деталям, где смещение меньше шести толщин материала — и снова оператор становится “движком столкновений”. 52S не моделирует объёмы в 3D. Он не покажет, как сформированная ножка проходит мимо горла станка. Вы снова в режиме «гнуть по воздуху и смотреть», просто теперь с более точными вычислениями.
DA‑58T занимает промежуточное положение. Сенсорный экран, некоторая 3D‑визуализация, базовые возможности офлайн‑работы. Это мост для цехов, переходящих к большему разнообразию, но не готовых полностью погрузиться в CAD‑управляемые рабочие процессы. Вы получаете более чёткое упорядочивание операций и определённое пространственное представление, но глубина интеграции зависит от конфигурации. Он может выполнять симуляцию, да. Будет ли её принуждать — зависит от калибровки и дисциплины настройки.
А затем DA‑66T. Полноценная 3D‑среда. Оснастка смоделирована как твёрдые тела. Рама машины тоже. Обнаружение столкновений по траектории движения. Офлайн‑программирование, связанное с импортом из CAD. При правильном вводе в эксплуатацию — а это большой «если» — он откажется выполнять последовательности, нарушающие его геометрические правила. Вот где симуляция начинает действовать как «привратник», а не как «советчик».
Вот реальность при чрезмерной комплектации: если 80 % вашего дохода обеспечивают простые кронштейны длиной до 24 дюймов, 66T не создаст чудесный ROI. Вы потратите больше времени на обслуживание библиотек инструментов, чем сэкономите за счёт предотвращённых столкновений. 52S может оказаться выгоднее — не потому что он лучше, а потому что вы не платите за цифровую глубину, в которую никогда не заходите.
3D окупается тогда, когда пространственная сложность начинает превосходить человеческую интуицию еженедельно, а не раз в квартал.
Так что если Delem предлагает чистую лестницу от стандартной надёжности к принудительной 3D‑дисциплине, что произойдёт, если вы выйдете за пределы этой линейки бренда?
Я бывал на заводах с контроллерами ESA, где интегратор связал пресс‑гиб с большей ячейкой — лазером, панелегибом, роботом‑загрузчиком. Контроллер не просто моделировал гиб; он был частью общей хореографии. Открытая архитектура — то есть доступные API и гибкие протоколы связи — позволяла интегратору соединять данные раскроя вверх по потоку с контролем качества вниз по потоку.
Эта гибкость — мощная вещь.
Она также требует компетентности. Открытые системы могут принуждать к правилам, но только если кто‑то правильно эти правила создаст. Я видел прекрасно интегрированные установки ESA, где пресс‑гиб отклонял программу, если ID инструмента из базы данных не совпадал с фактическим инструментом, закреплённым на месте. Я также видел “открытые” системы, где принудительные проверки отключали, потому что они замедляли производство во время пуско‑наладки. Открытость работает в обе стороны.
Cybelec, как правило, делает ставку на интуитивность работы — чёткая графика, понятное программирование. В цехах с высокой текучестью, где операторы сменяют друг друга на машинах, это критично. Если требуется три месяца, чтобы доверять контроллеру, вы уже потеряли производительность. Интуитивный интерфейс снижает брак из‑за ошибок оператора просто потому, что меньше кнопок читается неправильно. Но одна интуитивность не гарантирует, что контроллер заблокирует неправильную последовательность. Надпись “CNC” на шильдике — будто сама метка гарантирует точность — не значит ничего, если машина выполнит любой переданный ей код.
Сила Delem давно заключена в стабильности логики принуждения внутри своей экосистемы. Когда библиотека инструментов, параметры машины и данные о материалах настроены, контроллер ведёт себя предсказуемо от модели к модели. Эта стандартная надёжность — золото для цехов, где нет штатного инженера по системам управления, следящего за интеграцией.
Так что выбор становится практичным: вам нужна открытая архитектура, потому что вы строите связанную производственную ячейку, или нужен контроллер, которому обученный оператор может доверять, не вызывая IT каждый раз, когда меняется версия?
И именно проблема с версиями снова превращает контейнер для отходов в зал суда.
| Аспект | ESA | Cybelec | Delem |
|---|---|---|---|
| Ключевая позиция | Открытая архитектура для интеграторов | Интуитивно понятный интерфейс для магазинов с высокой текучестью кадров | Последовательное соблюдение правил в собственной экосистеме |
| Возможность интеграции | Доступные API и гибкие протоколы связи; лёгкое подключение к вышестоящим системам раскроя и нижестоящим системам контроля качества | Больше внимания уделяется автономной удобству использования, чем глубокой интеграции | Сильная интеграция в экосистему со стандартизированной логикой между моделями |
| Типичный вариант использования | Связанные производственные ячейки (лазер, панелегиб, роботизированная загрузка) | Магазины с чередующимися операторами и высокой текучестью кадров | Магазины без собственных инженеров по системам управления, требующие предсказуемого поведения оборудования |
| Сильная сторона | Высокая гибкость; поддерживает сложную многомашинную координацию | Чёткая графика и простое программирование; снижает путаницу у операторов | Надёжное, последовательное поведение после настройки инструмента и параметров |
| Риск / Ограничение | Требует высокой компетенции; правила применяются только при правильной настройке; во время наладки контроль может быть отключён | Интуитивный интерфейс не гарантирует предотвращение ошибочных последовательностей; наличие маркировки CNC само по себе не обеспечивает точность | Меньше внимания уделяется открытой настройке по сравнению с полностью открытыми системами |
| Предотвращение брака | Может отклонять программы при корректно настроенном контроле несоответствий инструмента/базы данных | Снижает количество брака, вызванного оператором, за счёт удобства использования | Предсказуемая логика контроля снижает количество ошибок на всех станках |
| Оптимальный фактор принятия решений | Необходимость открытой, связанной архитектуры | Необходимость быстрой адаптации оператора и минимального времени обучения | Необходимость стабильной, стандартизированной производительности без постоянного участия IT‑специалистов |
Представьте: лазер вырезает деталь ревизии F в 9 утра. Гибочный пресс, работающий по офлайн‑программам, хранящимся локально, загружает ревизию D, потому что никто не обновил папку. Симуляция была идеальной. Модель столкновений была точной. Гибы неверные.
Через три часа вы пересчитываете нержавейку толщиной 10‑га в контейнере для брака.
Без сетевого контроля версий — то есть когда пресс забирает текущий утверждённый файл с центрального сервера или системы ERP — даже самое продвинутое трёхмерное обеспечение защищает неверную геометрию. Обычная память ЧПУ этого не решает. Она просто аккуратнее хранит вчерашнюю ошибку.
Я видел, как в мастерских Индианы количество брака заметно снижалось только после объединения лазерного CAM, офлайн‑программирования пресса и ERP, чтобы номера деталей, ревизии и программы гибов были синхронизированы. Простая трёхмерная симуляция сама по себе не устранила несоответствия между резкой и гибкой. Это сделала интеграция. Пресс сигнализировал о программе, если идентификатор ревизии не совпадал с выпущенным маршрутным листом. Это контроль на уровне процесса, а не просто на уровне станка.
Вот неудобный вопрос: может ли ваш текущий станок вообще поддерживать такой уровень подключённости, или вы просто прикручиваете современное ПО к оборудованию, которое не может его реализовать?
Потому что если цифровая модель утверждает, что задний упор должен срабатывать с точностью ±0,1 мм, а обратная связь по оси смещается вдвое больше за смену, никакое семейство контроллеров вас не спасёт. Вы больше не выбираете между 52S и 66T. Вы выбираете между жизнью с ограничениями и необходимостью модернизации.
И именно здесь разговор о иерархии перестаёт быть разговором о функциях и превращается в вопрос о том, готово ли ваше железо отвечать требованиям программного обеспечения, которое вы на него ставите.
Вы можете подключить свой гибочный пресс к ERP, снабдить его чистым CAD, зафиксировать ревизии — и всё равно наблюдать, как ползун промахивается по глубине на четыре тысячных, потому что масло тёплое, а клапаны устали.
Вот вопрос, лежащий сейчас на верстаке: способно ли ваше железо действительно выполнять цифровые обещания, за которые вы только что заплатили?
Я устанавливал современные управления на ПК на рамы Pacific J‑Series, старше некоторых их операторов. Отливки 1960‑х годов. Оригинальные цилиндры. С правильными пропорциональными или сервоклапанами и свежей обратной связью мы удерживали повторяемость положения ползуна в пределах десятых долей. Не теория. Детали, измеренные в 10‑га нержавейке микрометром, а не по рекламной брошюре. Рамы не беспокоило свидетельство о рождении; её волновали управление потоком масла и обратная связь по положению.
Но я также видел, как мастерские устанавливают блестящий новый 3D‑контроллер на пресс с “мягкой” гидравликой и называют это «модернизацией». Экран был чётким. Логика цикла — быстрой. Гидравлический агрегат по‑прежнему реагировал с запозданием. Команда, пауза, дрейф, коррекция. Эта задержка не появляется в симуляции. Она появляется в контейнере для брака.
Программное обеспечение может предсказать упругий возврат с точностью до тысячных. Оно не может укрепить изношенные уплотнения.
Так что ловушка — не в том, что “старая машина значит плохая”. Ошибка — думать, что код может обогнать масло.
Современные контроллеры посылают сигналы коррекции за миллисекунды. Они рассчитывают на пропорциональные клапаны, реагирующие столь же быстро, и линейные датчики положения, которые сообщают фактические данные, а не усреднённые значения, сглаженные механическим люфтом. Если обратная связь по Y1 и Y2 поступает с изношенных линейных шкал с шумом, управление угадывает между выборками. Быстрый мозг. Медленные нервы.
Вот простой тест прямо на производстве. Задайте при низкой скорости перемещение на 0,020 дюйма и посмотрите на реальную траекторию перемещения. Двигается ли ровно и останавливается резко, или ползёт, перескакивает и потом успокаивается? Это время успокоения — механическое запаздывание. Каждая миллисекунда этого запаздывания уменьшает точность, которую ваша симуляция считала мгновенной.
Некоторые модернизации успешны именно потому, что решают эту проблему напрямую. Новые серво-клапаны. Новые уплотнения. Откалиброванные шкалы. И вдруг старый Pacific ведет себя так, будто понимает современный язык. Не железо было узким местом — а управление потоком жидкости.
А иногда верно противоположное.
Если гидроблок не может поддерживать стабильное давление при быстрой модуляции, то высокоскоростные контуры коррекции только усиливают нестабильность. Контроллер всё время гонится за движущейся целью, и вы получаете колебания в нижней точке хода. Программа точно выполняла команды. Масло не успевало. Кто виноват, когда угол уходит на полградуса по всей партии?
Представьте установку контроллера, вычисляющего глубину гиба с точностью ±0,01 мм, когда реальная повторяемость вашей машины колеблется на уровне ±0,08 мм в течение тёплой смены. На бумаге вы улучшили возможности в восемь раз. На практике не изменилось ничего, кроме ожиданий.
Этот разрыв дорог.
Операторы начинают подгонять коэффициенты материала, чтобы “исправить” нестабильные углы. Они повышают тоннаж в таблицах. Добавляют прокладки. Цифровая модель всё дальше уходит от физической реальности, и следующая работа превращается в эксперимент. Вы думали, что перенесли ошибку первого гиба в симуляцию. На деле вы просто вернули её обратно в сталь, только в более красивой упаковке.
Я видел, как заявленные приросты эффективности от одной лишь симуляции выходили на плато, потому что время отклика гидравлики ограничивало, насколько тесно можно было настроить контур управления. Это не ошибка софта. Это потолок системы. Можно сколько угодно ставить «мозг» мощнее, но если «рука» двигается как трактор — всё равно пашешь.
Контейнер для брака не заботится, насколько продвинутым выглядит интерфейс.
Тут гордость становится дорогой.
Если рама прямая, цилиндры в порядке, и машина может принять современные клапаны и обратную связь, продуманная модернизация способна превратить устаревший “ограниченный производственный” агрегат в дисциплинированный актив. Я видел, как рамы 1940-х годов честно зарабатывали на сложных деталях, потому что система управления и гидравлика были доведены до современного уровня. Не эффектно. Зато прибыльно.
Но если насос недостаточной мощности, коллекторы создают ограничение, а запчасти приходится искать по кладовкам, вы накладываете прецизионное ПО на механическую основу, которая изначально не была рассчитана на такой уровень контроля. В какой-то момент стоимость достижения стабильности превышает цену нового железа, изначально построенного с замкнутой гидропетлёй.
Вот проверка на чрезмерные требования: вы пытаетесь добиться авиационной повторяемости от пресса, который в основном гнёт кронштейны из мягкой стали с допуском ±1°?
Разумное решение — не “всегда модернизировать” и не “всегда заменять”. Оно в том, чтобы сопоставить ту цифровую дисциплину, которой вы добиваетесь, с той механической дисциплиной, которую машина физически способна обеспечить. Измерьте повторяемость в холодном и горячем состоянии. Проверьте время отклика клапанов. Проанализируйте разрешение обратной связи. А потом решайте, модернизируете ли вы систему — или просто украшаете ограничение.
Потому что реальная окупаемость инвестиций всё равно сводится к одному: ваш настрой переносит ошибку первого гиба в пиксели или продолжает кормить зал заседаний в конце цеха?
Вы переместили ползун на 0,020 дюйма и посмотрели на график. Вы видели, слушает масло или спорит. Хорошо. Теперь настоящий вопрос не в том, “может ли мой станок работать с высокопроизводительным контроллером?”. Он в том, “сможет ли этот контроллер действительно сократить количество отказов при первом гибе для тех деталей, которые я изготавливаю каждую неделю?”
Потому что логика управления оправдывает себя только тогда, когда соответствует вашему ассортименту деталей.
Цех, сгибающий десять разных кронштейнов до обеда, имеет иной характер отказов, чем цех, выполняющий 400 одинаковых панелей всю неделю. В первом случае ошибки возникают из-за путаницы при настройке, неправильного расположения инструментов, несогласованной последовательности гибов. Во втором — из-за дрейфа, усталости и человеческих сокращений. Одна и та же листогибочная машина. Разный «вердикт суда» в мусорном контейнере.
Так что рамка проста, но неочевидна: оценивайте программное обеспечение, задавая вопрос, где рождаются ваши отказы при первом гибе — в сложности или в повторении — и атакует ли выбранная логика управления это место напрямую. Не важно, сколько там кнопок. Не важно, насколько глянцевые градиенты. Важно, переносит ли она ваш конкретный риск из стали в симуляцию.
Какой у вас на самом деле тип производства?
Если ваши маршрутные листы выглядят как перетасованная колода карт — короткие партии, инженерные доработки, пять материалов до полудня — тогда ваш враг — энтропия настройки.
В этом мире деньги находятся не в сокращении цикла на 0,3 секунды, а в устранении 20-минутной паузы, пока оператор размышляет о порядке инструментов или, что хуже, проверяет это на нержавейке 10-го калибра, потому что симуляция не соответствует реальной библиотеке инструментов. Именно там рождается отказ при первом гибе — в несоответствии между цифровым инструментом, реальным инструментом и логикой последовательности гибов.
Так что вы проверяете контроллер по трём пунктам:
Если какой-то из этих пунктов “хромает”, то «виртуальный» первый гиб — это выдумка. Вы всё ещё отлаживаете процесс на производстве — просто с более красивым вступлением.
Вот проверка на завышенные спецификации: платите ли вы за интеграцию с 7-ю осями робота, если ваша настоящая проблема — в несогласованном вводе данных инструмента?
В условиях большого ассортимента правильный контроллер — тот, который сводит решения по настройке в проверенную цифровую репетицию. Окупаемость проявляется в меньшем количестве бракованных заготовок и меньшем числе споров операторов. Мусорный контейнер становится тише не потому, что станок быстрее, а потому, что путаница не доходит до стали.
А что если ваш цех не живёт в хаосе?
Я бывал в цехах, где шесть месяцев подряд делают одну и ту же панель корпуса. Те же 12 гибов. Тот же материал. Тот же оператор.
Если поставить в эту ячейку высококлассный многосвевой контроллер с полной симуляцией — вы можете ничего не выиграть. А можете и потерять.
Почему? Потому что, как только программа проверена, уровень отказов при первом сгибе уже почти равен нулю. Риск заключается не в последовательности или столкновении. Он в стабильности на протяжении времени. Гидравлическая устойчивость. Повторяемость заднего упора. Дисциплина оператора.
В таком случае надежный, более простой ЧПУ — даже хорошо запрограммированный НЧПУ с цифровыми индикаторами и сохраненными программами — может превзойти сложную систему. Меньше уровней. Меньше затрат на обучение. Меньше мест, где можно ошибиться при клике. Оператор становится частью контура тонкой настройки.
Та сравнительная таблица JSTMT, где говорится о наладках на 30–60 минут на базовых системах НЧПУ? В условиях частых переналадок это действительно так. Но в настоящем серийном производстве, где настройка выполняется один раз и работает неделями, эти расходы сводятся к нулю. Преимущество “более быстрой программировки” в продвинутых системах там просто не проявляется.
Вот неприятный вопрос: вы пытаетесь купить сложность, чтобы решить проблему, которой у вас на самом деле нет?
Если ваши серийные работы редко меняются, а допуски достаточно широкие, то контейнер для брака, возможно, больше зависит от состояния гидравлики, чем от 3D‑симуляции. В таком случае внедрение продвинутой логики управления в стабильный, повторяющийся процесс может добавить новые точки отказа — программную сложность там, где ранее железная память оператора обеспечивала стабильность.
Так как же избежать угадывания, к какой категории вы относитесь, до подписания заказа на покупку?
Вот момент, когда нужно перестать слушать списки функций и начать проводить тесты.
Первый вопрос: “Покажите, как ваша симуляция использует реальные данные по моему инструменту — не библиотеку из демонстрации”.”
Если они не могут импортировать ваши реальные спецификации пуансона/матрицы и доказать отсутствие коллизий при обработке одного из ваших сложных изделий, вы не переносите отказ первого сгиба в пиксели. Вы всего лишь устраиваете репетицию с реквизитом, который вам не принадлежит.
Второй вопрос: “С учётом измеренной повторяемости моей машины — в холодном и горячем состоянии — как ваша система управления компенсирует это?”
Вы уже проводили пробный запуск. Вы знаете свой допуск ±. Если поставщик не может объяснить, как работает их контур коррекции внутри этих механических ограничений, вы снова задаёте системе избыточные требования. Код не может превзойти масло.
Третий вопрос: “Для моих пяти наиболее повторяющихся деталей как эта система управления сократит брак по сравнению с тем, что я использую сейчас — конкретно?”
Пусть они пройдут через ваш реальный ассортимент: одно сложное изделие, одну основную серийную деталь, одну чувствительную к допуску позицию. Если ответ расплывчатый — больше осей, более быстрый процессор, лучший интерфейс — вы слышите маркетинг. Если ответ конкретный — меньше пробных сгибов, автоматическая регулировка прогиба, связанная с материалом, подтверждённая проверка зазора упора — вы слышите механизм.
Главное, что нужно запомнить: оценивайте логику управления, исходя из места возникновения ваших отказов при первом сгибе, а не из списка её функций.
Это неочевидно, потому что индустрия приучает вас сравнивать экраны и характеристики. Но контейнер для брака не оценивает экраны. Он оценивает, был ли первый изготовленный элемент уроком — или успешной деталью.
И как только вы начинаете мыслить таким образом, каждое решение о программном обеспечении перестаёт быть вопросом возможностей и становится вопросом вердикта.


















