

مكبح بطول 10 أقدام، بوزن 120 طن، القالب السفلي به فجوة بالكاد تكفي لابتلاع طرف الإصبع. يقوم المشغّل بمحاذاة القطعة، يسحب يديه للخارج، ويصل إلى أزرار الكفّ المزدوجة المثبتة على قاعدة. ينزل المكبس بينما هو بالفعل ينحني للأمام ليمسك بالقطعة عند صعود المكبس.
هو “متوافق”.”
فلماذا يقوم المشرف بملء تقرير حادث وهناك دم على الأرض؟
سِر في أي ورشة بُنيت قبل عام 2015 وسترى نفس الإعداد: أزرار كف مزدوجة متباعدة حسب المعيار ANSI B11.3 بحيث تكون يد المشغّل خارج نقطة التشغيل عند بدء الدورة. أسلاك ثنائية القناة. منع التكرار. سجل اختبار ربع سنوي موقّع بحبر أزرق.
على الورق، الأمر نظيف.
على الأرض، انظر إلى الإيقاع. ضع القطعة في مكانها. ارجع للخلف. اضغط. تقدّم. أمسك. أعد الوضعية. ارجع للخلف. اضغط مرة أخرى. كل انحناء يتطلب إعادة ضبط كامل للجسم بعيدًا عن الفكّين قبل أن يتحرك الفولاذ.
تلك الإعادة هي ثمن الالتزام، وقد كنت تدفعه بالثواني وبالجلد.
أدوات التحكم ثنائية اليد لا تزيل الخطر، بل تجبر على الابتعاد في لحظة البدء فقط. المكبس لا يزال عبارة عن أسنان فولاذية مغلقة؛ لقد علمتَ المشغّل فقط أن يتراجع قبل العضّة. الآلة لا تعرف أين توجد يداه بمجرد بدء الدورة.
إذا كنت تعتقد أن المسافة تساوي الحماية، فأنت بالفعل تراهن على سجل الحوادث لديك بالأمل—والمفتشون لا يغرّمون الأمل، بل يغرّمون الإخفاقات.
لقد راجعت حالة حيث ضرب المشغّل كلا الزرين، نزل المكبس، ومع ملامسة القالب للقطعة، مدّ يده غريزيًا لتثبيت شفة ضيّقة بدأت في الانحناء.
المكبح لم يهتم. كان في منتصف الشوط.
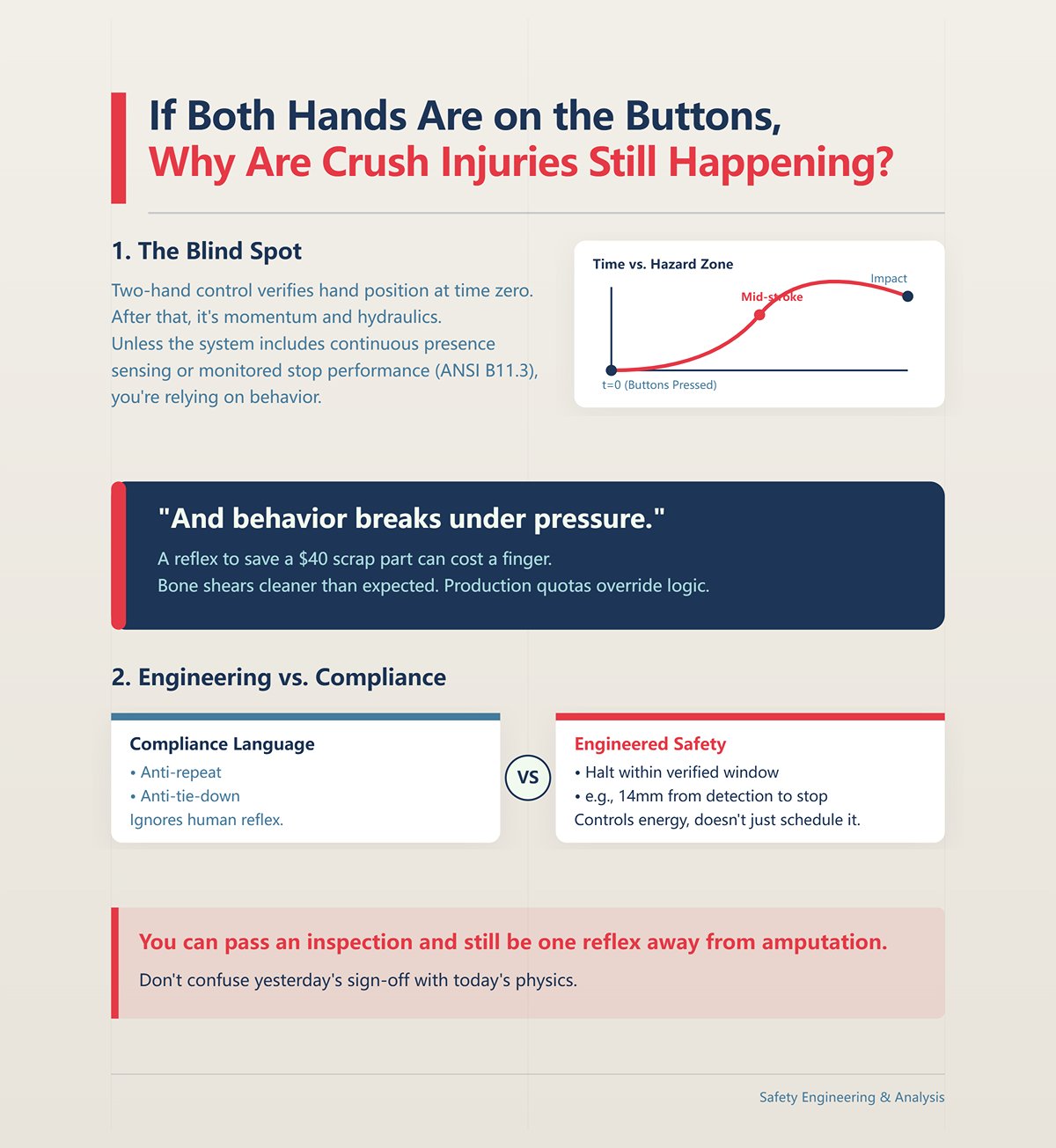
هذه هي النقطة العمياء. التحكم ثنائي اليد يتحقق من موقع اليد عند لحظة الصفر. بعد ذلك، الأمر يتعلق بالزخم والهيدروليك. ما لم تتضمن النظام إحساسًا مستمرًا بوجود اليد أو أداء توقف مُراقَب يلبي المعيار ANSI B11.3 التوقعات الحالية، فإنك تعتمد على السلوك.
والسلوك ينهار تحت الضغط.
منذ عشرين عامًا شاهدت رجلاً يفقد طرف إصبعه السبّابة لأنه حاول “مجرد دفع” قطعة تنزلق أثناء النزول. العظم يُقطع أنظف مما تتوقع. كان لديه تحكم ثنائي اليد. وكان لديه أيضًا حصة إنتاج.
لغة الالتزام تتحدث عن منع التكرار ومنع الربط المستمر. لكنها لا تتحدث عن رد الفعل البشري لإنقاذ انحناء ملتوي قيمته أربعون دولارًا في الخردة. منطقة الخطر لا تزال مفتوحة بمجرد أن يلتزم المكبس، وإذا لم يكن أداء التوقف مُهندسًا للتوقف ضمن نافذة مُتحقق منها—فكر 14 مم من الاكتشاف إلى التوقف—أنت لا تتحكم في الطاقة، بل تُجدولها.
يمكنك أن تجتاز التفتيش ومع ذلك تكون ردة فعل واحدة على بُعد خطوة من البتر. لا تخلط بين توقيع الأمس وبين فيزياء اليوم، وإلا ستكون الغرامة التي تلي ذلك تحتوي على أصفار أكثر من مكافأتك الفصلية.
الآن استبدل أزرار الكف بآليات السحب الخلفي الميكانيكية—كابلات على المعصمين تتراجع عند هبوط الكباس. رأيتُ مشغلين يشدونها بإحكام لدرجة ترك علامات حمراء لأن النظام يتراجع فقط إلى الحد الذي تم ضبطه عليه.

شغّل ذلك لمدة ثماني ساعات على ألواح ثقيلة.
كل دورة: تمد الذراعين للأمام للتمركز، يتوتر الكابل، وتقاوم الأكتاف السحب أثناء هبوط الكباس، ثم تحارب قوة النابض عند العودة. نعم، إنها تُبقي الأيدي خارج منطقة القالب، لكنها أيضًا تُحمّل الكتف الدوّار آلاف المرات خلال وردية واحدة.
لقد استبدلت خطر السحق الفوري بالإجهاد التراكمي.
والإجهاد لا يظهر في سجل OSHA 300 بالطريقة التي يظهر بها طرف الإصبع المبتور. إنه يظهر على شكل وقت ضائع، ومطالبات تعويض العمال المصنفة ’إفراط في الجهد“، وعامل مكابح يبلغ من العمر 52 عامًا لا يستطيع رفع ذراعه فوق صدره. لقد انتقل الخطر من نقطة القرص إلى المفصل.
إذا كان جهاز الأمان لديك يحمي الماكينة بشكل أكثر موثوقية من جسم المشغل، فما الذي تحاول تحسينه بالضبط؟
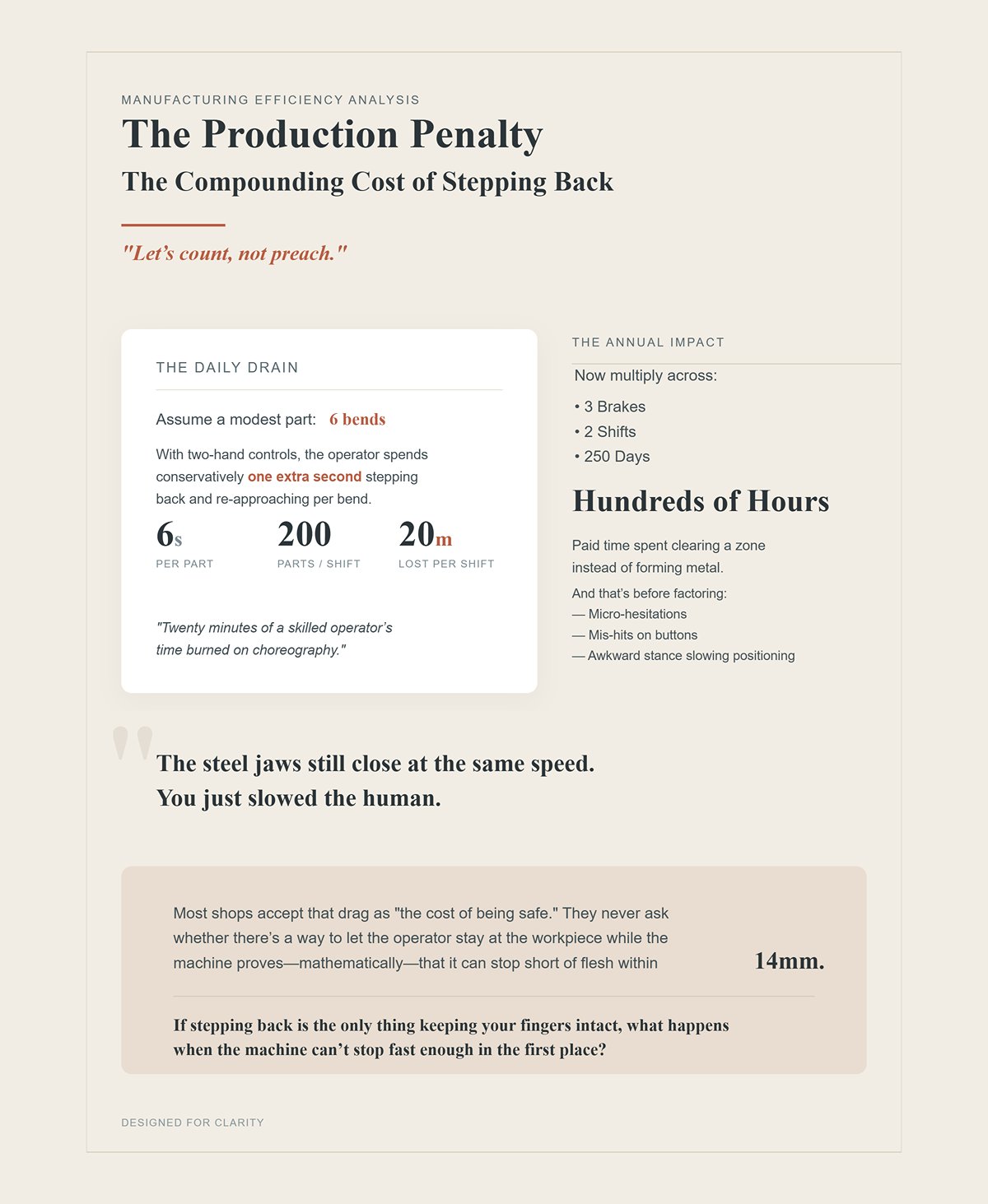
لنحسب، لا نُوعِظ.
افترض جزءًا بسيطًا: 6 انحناءات. باستخدام أدوات التحكم الثنائية، يقضي المشغل—بتقدير متحفظ—ثانية إضافية واحدة في التراجع ثم الاقتراب مرة أخرى لكل انحناءة. أي 6 ثوانٍ لكل جزء. عند 200 جزء في الوردية، هذا يعني 1200 ثانية. عشرون دقيقة.
عشرون دقيقة من وقت عامل ماهر تُستهلك في الحركات التنظيمية.
الآن اضرب ذلك في ثلاث مكابح، ورديتين، و250 يومًا. ستحصل على مئات الساعات سنويًا—زمن مدفوع يُنفق على إخلاء المنطقة بدلًا من تشكيل المعدن. وهذا قبل أن تحسب الترددات الصغيرة، والضغطات الخاطئة على الأزرار، والوضعيات غير المريحة التي تُبطئ التموضع.
ما زالت فكوك الفولاذ تُغلق بنفس السرعة. أنت فقط أبطأت الإنسان.
تقبل أغلب الورش ذلك البطء باعتباره “ثمن السلامة”. ولا يسألون أبدًا ما إذا كان هناك طريقة تُمكّن المشغل من البقاء عند قطعة العمل بينما تُثبت الماكينة—رياضياً—أنها يمكن أن تتوقف قبل ملامسة الجلد ضمن 14 مم.
إذا كان التراجع هو الشيء الوحيد الذي يُبقي أصابعك سليمة، فماذا يحدث عندما لا تستطيع الماكينة التوقف بسرعة كافية في المقام الأول؟
أنت واقف عند المكبس، يداك على الحافة بطول 36 بوصة، وعيناك على رأس الخرامة. الكباس يهبط بسرعة الإنتاج—متجاوزًا بكثير 10 مم/ثانية. غريزتك تقول: إذا حدث خطأ ما، فإن نظام الأمان سيوقفه.
السؤال الذي يهم فعلاً: هل يمكنه التوقف ضمن 14 مم المكان الذي ستكون فيه إصبعك؟
ليس “هل لديه زران”. ليس “هل هناك ليزر”. ليس “هل قال البائع إنه مطابق”. تحت المعيار ANSI B11.3, ، ينهار نموذج المخاطر بالكامل إلى قياس واحد صارم — المسافة التي تتحركها المكبس من لحظة اكتشاف الخطر حتى لحظة التوقف الكامل للحركة. إذا تجاوزت تلك المسافة 14 مم عند سرعة الإنتاج، فلن يكون لديك حماية قريبة المدى. لديك عرض مسرحي.
والعرض المسرحي لا يبطئ الفولاذ.
مكبس الثني هو مجموعة فكوك مغلقة. التحكم باليدين يجعلك تتراجع عن الأسنان قبل العضّة. جهاز حماية ضوئي نشط (AOPD) يحاول توقيت العضّة بحيث تتوقف الفكوك قبل الإغلاق الكامل. لكن لا يهم أي منهما إذا كان أداء التوقف للآلة لا يمكنه فعليًا تلبية ذلك 14 مم الإطار الزمني.
إذًا قبل أن تسأل أي وسيلة حماية هي الأفضل، اسأل سؤالاً أصعب: ما هي مسافة التوقف الفعلية لديك، المقاسة تحت الحمل، اليوم؟
لا يهم إدارة OSHA ما قمت بتركيبه. ما يهمهم هو العلاقة بين وقت التوقف والمسافة الآمنة بموجب 29 CFR 1910 Subpart O. تلك العلاقة حسابية وليست رأيًا.
هذا هو ما يحدث فعليًا على أرض العمل.
إذا كان مكبس الثني يعمل أسرع من 10 مم/ثانية, المعيار ANSI B11.3 فلا يسمح لك بالاعتماد على “السرعة الآمنة” فقط. عند تلك السرعات، يمكن للمشغل الوصول إلى منطقة القالب قبل أن يتمكن المكبس من التباطؤ إلا إذا اكتشف جهاز استشعار وجود تدخل وتوقف المكبس ضمن مسافة مؤكدة — مرة أخرى، فكر في 14 مم كعتبة حرجة لأنظمة AOPD ذات القرب العالي.
تخيل الآن حاجز ضوئي مثبت على بعد 200 مم من نقطة التماس. إذا كانت مسافة التوقف المقاسة لديك 120 مم، فأنت بخير — نظريًا. لكن إذا كان بإمكان المشغل الوقوف بين ذلك الحاجز والقالب بدون اكتشاف، فقد أنشأت منطقة عمياء هندسية. يطلب المعيار صراحةً حماية إضافية في هذا السيناريو. المسافة بدون اكتشاف هي ثغرة كبيرة بما يكفي لمرور يد.
إذًا المتغير الحقيقي ليس الجهاز. إنه:
وقت التوقف × سرعة الاقتراب = المسافة الآمنة الدنيا.
إذا لم تحسب ذلك لآلة الثني الخاصة بك، مع حالتها الهيدروليكية، وبسرعة الإنتاج لديك، فأنت تخمّن. والتخمين أمام مسؤول امتثال OSHA يتحول بسرعة إلى مخالفات. هم لا يغرمون العلامات التجارية لأجهزة الاستشعار. هم يغرمون الأداء غير المؤكد للتوقف.
| الموضوع | التفاصيل |
|---|---|
| الأساس التنظيمي | تقوم إدارة السلامة والصحة المهنية OSHA بتقييم الامتثال بناءً على العلاقة بين زمن التوقف ومسافة الأمان بموجب 29 CFR 1910 الفرع الفرعي O. هذه العلاقة حسابية وليست رأيًا. |
| تحديد السرعة الآمنة | إذا تجاوزت سرعة المكابح 10 مم/ث, ، فإن المعيار ANSI B11.3 لا يسمح بالاعتماد على “السرعة الآمنة” وحدها. |
| المخاطر عند السرعات العالية | عند السرعات التي تزيد عن 10 مم/ث، قد يصل المشغل إلى منطقة القالب قبل أن يتباطأ المكبس ما لم يكتشف جهاز استشعار وجود تدخّل ويوقف المكبس ضمن مسافة مؤكدة (على سبيل المثال،, عتبة 14 مم لأنظمة AOPD ذات القرب الشديد). |
| مثال على حاجز ضوئي | حاجز ضوئي مثبت على بعد 200 مم من نقطة الانحصار مع مسافة توقف مقاسة تبلغ 120 مم يبدو مطابقًا على الورق. |
| مخاطر البقعة العمياء الهندسية | إذا تمكن المشغل من الوقوف دون أن يتم اكتشافه بين الحاجز والقالب، فإن هناك بقعة عمياء. تتطلب المعايير حماية إضافية في هذه الحالة. وجود مسافة بدون كشف يشكل خطرًا كبيرًا. |
| الصيغة الأساسية | إيقاف الوقت × سرعة الاقتراب = الحد الأدنى للمسافة الآمنة |
| مخاطر الامتثال | إذا لم يتم حساب مسافة التوقف للفرامل المحددة، وحالة النظام الهيدروليكي، وسرعة الإنتاج، فإن الامتثال يعتمد على التخمين. إدارة السلامة والصحة المهنية (OSHA) تذكر أداء التوقف غير الموثق — وليس علامات المستشعر التجارية. |
لنكن عمليين.
يقيس اختبار التجاوز المسافة التي يقطعها الكباس بعد بدء إشارة التوقف. ليس مدى سرعة التوقف المفترض. بل مدى سرعة التوقف الفعلية. تحت الحمل. عند درجة الحرارة. على تلك الآلة.
تشغل الكباس بسرعة الاقتراب العادية. تُطلق إشارة التوقف — إما عبر نظام التحكم أو وظيفة اختبار AOPD. تقيس المسافة من الإشارة حتى التوقف الكامل. هذا الرقم هو حقيقتك.
لقد رأيت فرامل يتم الإعلان عنها بأنها “جاهزة لـ AOPD” تجاوزت 22 مم في صباح بارد و18 مم بعد الظهر عندما أصبح الزيت أرق. كلا الرقمين يتجاوز 14 مم. كلا الرقمين يستبعدان الآلة من الحماية الحقيقية القريبة المدى وفقًا لـ المعيار ANSI B11.3 التوقعات.
وهنا المفاجأة: إرشادات OSHA تتطلب مراقبة أداء التوقف للتحقق من الانحراف في كل ضربة. ليس مرة في السنة. وليس “عندما تصل الصيانة إليها”. إذا انحرف وقت التوقف ولم تلاحظه، فإن المسافة الآمنة المحسوبة وهم.
الوهم مكلف. المفتشون لا يناقشون نواياك؛ بل يقيسون أرقامك.
لذلك، عندما يخبرني أحد الورش، “لقد ركّبنا الليزر، نحن محميون”، يكون سؤالي الأول بسيطًا: أرني آخر اختبار موثق لمسافة التوقف. إذا لم يتمكنوا، تنهار رواية السلامة بالكامل في حوالي ثلاثين ثانية.
إذا لم تتمكن من إثبات أن الكباس يتوقف قبل ملامسة اللحم ضمن 14 مم, ، فأنت لا تملك سلامة هندسية. لديك تفاؤل مع أسلاك.
الآن نصل إلى الجزء الذي لا يريد أحد سماعه.
أجهزة AOPD صادقة بشكل صارم. العديد من الأنظمة المبنية على المعيار ANSI B11.3 لن تسمح للفرامل بالدوران بنفس السرعة الكاملة إذا فشل الليزر. بعضها لن يعمل إطلاقًا. هذا ليس عيبًا في التصميم — بل المعيار يجبر على الاختيار: إصلاح الحماية أو إيقاف الإنتاج.
لكن هنا حيث يتم الإضرار بالورش.
إنهم يثبتون جهاز كشف وجود ضوئي فعّال حديث (AOPD) على نظام هيدروليكي عمره عشرون عامًا، مزوّد بصمامات تناسبية مهترئة، وبكرات لاصقة، واستجابة مضخة محدودة. يكتشف المستشعر التداخل في غضون ميلي ثانية. يرسل النظام أمر الإيقاف فورًا. يتردّد الصمام. يتسرب الضغط ببطء. وينزلق الكباس.
الكشف سريع. التباطؤ ليس كذلك.
إذا كان دارتك الهيدروليكية لا تستطيع تفريغ الضغط وإغلاق التدفق بسرعة كافية لتلبية ذلك 14 مم الإطار الزمني للإيقاف، فإن أكثر المستشعرات تطورًا في العالم لن تنقذك. بل سيصبح شاهدًا على الفشل.
لقد قمت بتدقيق آلات كانت غير قادرة ميكانيكيًا على التأهيل لجهاز AOPD قريب المدى لأن مسافة توقفها تجاوزت الحد المسموح به. المعيار واضح: المكابح التي لا يمكنها التوقف بشكل موثوق ضمن تلك المسافة لا تعمل بكفاءة كافية لتُزوّد بطريقة الحماية تلك. لا يمكنك أن تعالج زيتًا بطيئًا عن طريق البرمجيات.
إذن إليك اختبار الواقع.
قبل أن تضع الميزانية لأجهزة الليزر، وقبل أن تعد المشغلين بأنه بإمكانهم البقاء عند قطعة العمل دون التراجع خطوة، اختبر الآلة. تحقق من مسافة التوقف. قيّم زمن استجابة الصمام، وتلاشي الضغط الهيدروليكي، وزمن تأخير التحكم كنظامٍ متكامل.
لأنك إذا لم يكن كباسك قادرًا على التوقف ضمن 14 مم, ، فإن كل جهاز أمان آخر في العالم لا يعدو كونه عرضًا مسرحيًا — والمخالفة التي ستأتي بعد ذلك لن تهتم بمدى تطور مستشعرك كما بدا في الكتيب.
لنفترض أن مكبحك الهيدروليكي من عام 1992 يتجاوز 18 ملم بعد الغداء و 22 ملم عند التشغيل البارد. لقد أجريت الاختبار. لديك الأرقام. تقترب من 14 مم حتى تكاد تلمسه — ومع ذلك ما زلت خارج الإطار المسموح به للحماية القريبة الحقيقية بموجب المعيار ANSI B11.3.
فما هي خياراتك؟
إذا لم تتمكن الآلة فعليًا من التوقف ضمن 14 مم, ، فهناك ثلاثة مسارات صادقة أمامك. الأول: إعادة بناء الاستجابة الهيدروليكية — الصمامات، الحشوات، تلاشي الضغط، تأخر التحكم — حتى يتأهل زمن التوقف. الثاني: نقل جهاز استشعار وجود الأشخاص بعيدًا عن القالب ليتناسب مع مسافة التوقف الحقيقية، مما يزيد المسافة الآمنة ويجبر المشغل على التراجع. الثالث: العودة إلى التحكم باليدين أو الحواجز المحيطية وقبول انخفاض الإنتاج.
هذا كل شيء. لا يوجد باب رابع.
ولكن عندما تعمل الآلة أن وتستوفي متطلبات التوقف — يتم التحقق منها، وتوثيقها، ومراقبتها في كل ضربة — هنا يظهر دور جهاز الأمان النشط البصري‑الإلكتروني (AOPD). على عكس أدوات التحكم ذات اليدين اللتين تُجبران المشغّل على التراجع عن فكي الفولاذ، يهبط جهاز AOPD مع الكباس، فيحمي نقطة العض الفعلية حتى يتم الوصول إلى نقطة الكتم. فالحماية توجد حيث يوجد الخطر.
وهنا تكمن نقطة التحول.
أدوات التحكم ذات اليدين تحمي بداية الحركة. جهاز AOPD يحمي الحركة الخطرة.
إذا كان جهاز الأمان لديك يحمي الماكينة بشكل أكثر موثوقية من جسم المشغل، فما الذي تحاول تحسينه بالضبط؟
تخيل مكبحًا بطول 10 أقدام يقوم بثني حوض ضحل. تُركب الستارة الضوئية القياسية على بعد 200 مم من مساحة القالب لتلبية المسافة الآمنة المحسوبة بناءً على زمن التوقف. يُدخل المشغّل الصفيحة، يبدأ الكباس بالهبوط، وفي منتصف الضربة ينكسر الشعاع بسبب اللوح المرتد.
توقف. إعادة ضبط. دورة أخرى.
هذا هو التوقف المزعج الذي يشتكي منه الجميع.
المشكلة ليست في الستارة. بل في الهندسة.
تُنشئ الستائر الضوئية التقليدية جدار كشف عمودي. أي شيء يدخل هذا الجدار يوقف الضربة. وهذا مثالي عندما يكون هدفك هو إبقاء جميع العاملين خارج منطقة الخطر بالكامل أثناء الضربات الكاملة — خاصةً عند العمل على أجزاء كبيرة أو أماكن عمل مشتركة. لكن أثناء ثني الصناديق أو العمل على الحواف، يصبح الجزء نفسه هو المتطفل.
أنظمة الليزر القريبة من نقطة التشغيل AOPD تعمل بطريقة مختلفة. فهي تُسقط مجال استشعار ضيقًا على بعد بضعة مليمترات فقط فوق فتحة القالب وتسير مع الكباس حتى نقطة الكتم المبرمجة. وبدلاً من حماية مساحة فارغة على بعد 200 مم، فإنها تحمي مباشرة نقطة القرص — وتوقف الكباس إذا دخل أي شيء تلك المنطقة قبل عمق الكتم.
لا توجد منطقة عمياء بين الستارة والقالب. لا حاجة للتراجع. ولا انقطاع للشعاع في منتصف الضربة بسبب شكل الجزء.
تتيح الأنظمة الحديثة لك حتى التبديل بين الأوضاع — الليزر لثنيات الصناديق الدقيقة، والستارة الضوئية للأدوات الطويلة أو الحماية الكاملة — عبر واجهة المستخدم HMI، مع بقاء مراقبة زمن التوقف فعالة في كليهما. هذا النهج الهجين أنهى الجدل القديم بين الخيارين.
لم يكن التوقف المزعج دليلاً على أن الستائر الضوئية عديمة الفائدة. بل كان دليلاً على أن الحماية المعتمدة على المسافة والعمل عند نقطة التشغيل يعالجان مشكلتين مختلفتين.
ركّب ستارة على مسافة كافية لتلبية مسافة التوقف الفعلية وستفقد القرب. ركّبها بالقرب دون التحقق من زمن التوقف وستفقد الامتثال.
وإذا لم تطابق معادلتك لمسافة الأمان أداء التوقف الموثّق لديك، فقد سلمت المفتش مخالفة تحمل اسمك.
الآن ندخل في الجزء الذي تخطئ فيه الورش.
أثناء ثني الصندوق، يجب أن يدخل الحافة في مجال الكشف. إذا توقّف النظام في كل مرة يعبر فيها المعدن الشعاع، فلن تتمكّن أبداً من إكمال القطعة. لذلك نستخدم "التعطيل المؤقت" — وهي نقطة مبرمجة في شوط المكبس تسمح فيها وحدة الكشف البصرية النشطة (AOPD) بدخول المادة، لأن الفجوة المتبقية تكون أقل من المسافة الآمنة المُتحقق منها.
عند تنفيذ التعطيل المؤقت بشكل صحيح، يُربط مباشرة بمسافة التوقف المقاسة. إذا كانت المسافة المتحققة لتجاوز نقطة التوقف هي 13 مم, ، فستُضبط نقطة التعطيل بحيث لا يمكن للطرف الضاغط أن يتحرك أكثر من تلك المسافة المتبقية قبل التوقف الكامل.
أما عند تنفيذه بشكل متهاون، فيقوم المشغّلون بـ“تعتيم” مناطق كاملة أو تعطيل الجهاز لأجل الراحة.
يبدو التعطيل الكامل وكأنه يزيد الإنتاجية. إلى أن يمدّ أحدهم يده أثناء تلك الفترة غير المحمية.
وفقاً لـ المعيار ANSI B11.3, يجب أن يكون التعطيل المؤقت خاضعاً للتحكم، وموثقاً، ومرتبطاً بأداء التوقف لتلك الآلة تحديداً. تقوم العديد من وحدات AOPD الحديثة بمراقبة زمن التوقف في كل شوط، وستغلق الماكينة إذا تجاوز الانحراف الحدود المسموح بها. هذا لا يعني أن النظام معقّد أو مزعج، بل إنه يمنع حسابات التعطيل المؤقت من أن تصبح غير واقعية.
لقد رأيت ورشاً تقوم بتعطيل مراقبة زمن التوقف لأن الإغلاقات الوهمية كانت تبطئ الإنتاج. ومع ذلك، كانوا لا يزالون “يشغّلون الليزر”.”
هو “متوافق”.”
إلى أن يأتي تقرير التفتيش ليراجع بيانات التوقف المسجلة مقابل معادلة المسافة الآمنة المطلوبة بموجب 29 CFR 1910 الفقرة الفرعية O.
لا يمكنك تعطيل قوانين الفيزياء. ولا يمكنك الجدال في الحسابات مع ضابط الامتثال الذي يحمل شريط قياس وسجلات صيانة المصنع الخاصة بك.
لنتحدث عن الإنتاجية.
في إعداد التحكم باليدين، شاهد مشغّلًا خبيراً يصنع 200 قطعة صغيرة. يرفع يديه عن القطعة. يضغط على الأزرار. ينتظر نزول المكبس. ثم تعود يداه إلى موضع التشغيل لإعادة التثبيت.
تلك السلسلة الصغيرة من الحركات تستغرق ربما نصف ثانية إضافية في كل دورة مقارنة بالبقاء عند قطعة العمل.
نصف ثانية تبدو شيئاً تافهاً. ولكن على مدار 200 قطعة، تعني 100 ثانية إضافية. وعلى مدى 1,000 قطعة، تزيد عن ثماني دقائق. وذلك قبل احتساب الترددات الصغيرة، والإخفاقات في الضغط على الأزرار، والوضعيات غير المريحة التي تبطئ عملية التثبيت.
مع نظام AOPD القريب من نقطة العمل، لا تغادر يدا المشغّل القطعة إلا إذا اختار ذلك. ينزل المكبس بالسرعة الطبيعية، والحماية فعالة حتى لحظة التعطيل. لا حاجة للتراجع. لا حاجة لمدّ اليد إلى الأزرار. فقط حمل، محاذاة، تشغيل، تكرار.
تتوقع الورش أن السلامة ستكلف وقتاً. لكن عندما ينتقلون من التحكم باليدين إلى AOPD مُكوَّن بشكل صحيح على مكبس مؤهل ضمن 14 مم, ، غالباً ما يُفاجأون برؤية أوقات دورة مساوية أو أسرع — لأن حركة المشغّل أصبحت أقصر.
حركة أقصر. إجهاد أقل. تأخيرات دقيقة أقل.
لكن هذا ينطبق فقط إذا كانت أداء التوقف للآلة حقيقيًا وثابتًا. إذا أجبرك التأخر الهيدروليكي على تركيب الحماية على مسافة أبعد، فأنت تعود إلى الابتعاد عن منطقة العمل، مما يقتل تلك الكفاءة.
إليك الحد الصارم.
إذا لم يتمكن مكبحك من التوقف بشكل موثوق ضمن 14 مم, ، فعليك إما إصلاح النظام الهيدروليكي، أو قبول زيادة مسافة الأمان مع تقليل القرب، أو البقاء مع ضوابط اليدين الاثنين وإنتاج أبطأ. نظام AOPD ليس سحرًا. إنه رياضيات تعتمد على الزيت والفولاذ.
وإذا ادعيت حماية قريبة من المعدات بدون بيانات توقف موثقة لدعم ذلك، فلن يكون لزيادة الإنتاج أي أهمية عندما تصل الغرامة إلى مكتبك.
في الخريف الماضي وقفت بجانب مكبس ثني بطول عشرة أقدام بينما كان موظف امتثال OSHA يتصفح ملفًا ويسأل عن ثلاثة أمور: أحدث نتائج اختبار زمن التوقف، إثبات تقييم المخاطر وفقًا لـ المعيار ANSI B11.3, ، وسجلات تظهر أن جهاز مراقبة زمن التوقف لم يتم تجاوزه. كان لدى الورشة أشعة ليزر على المكبس. وكان المالك يكرر، “نحن محميون.”
لم يهتم المفتش بالمعدات. كان يهتم بالأرقام.
كان يريد تجاوز موثق بالملليمترات عند درجة الحرارة التشغيلية الكاملة، وتأكيد أن النظام توقف ضمن 14 مم تحت الحمل الأسوأ، وأدلة على أن نقاط التعطيل تم حسابها من تلك البيانات — وليس تخمينًا. قارن المسافة المسجلة للتوقف مع عمق التعطيل المضبوط. ثم طلب سجلات الصيانة لإثبات أن الأداء لم يتدهور.
هذا هو ما يبدو عليه “جاهز للتفتيش” عمليًا: مسافة توقف مقاسة (باردة ودافئة)، مسافة أمان محسوبة، منطق تعطيل مرتبط، تفعيل تلقائي لمراقبة زمن التوقف، وتقييم مخاطر محفوظ في الملف يشير إلى المعيار ANSI B11.3 ومنهجية B11.0. ليس ملصقًا. وليس كتيب مبيعات. بل حسابات يمكنك الدفاع عنها.
وإذا قالت أوراقك 14 مم لكن آخر توقف تم التحقق منه كان 18، فإن الغرامة ستأتيك مع الفوائد.
الآن دعنا نتحدث عن حيث تلتقي الرياضيات بالواقع.
تخيل صندوقًا بأربعة جوانب، بحواف طولها 3 بوصات على جميع الجوانب. في الثنية الثالثة، تتجه تلك الحواف نحو الأعلى مثل قرون. أثناء نزول المكبس، تدخل القطعة نفسها مجال الاستشعار. مع ستارة ضوئية تقليدية مثبتة على بعد قدمين، تكون قد عميت مناطق هنا وهناك فقط لإنهاء القطعة.
التعتيم ليس سيئًا. التعتيم الأعمى هو السيئ.
وفقاً لـ المعيار ANSI B11.3, ، يُسمح بنظام AOPD قريب من المعدات فقط بعد تقييم مخاطر موثق. يجب أن يأخذ هذا التقييم في الاعتبار هندسة القطعة، ارتفاع الأدوات، مدى وصول المشغل، وأداء التوقف الموثق للآلة. إذا أجبرت الحافة الأيدي على دخول ذلك 14 مم إيقاف النافذة قبل الكتم، عليك إما ضبط العملية أو تبديل الأوضاع.
تتيح لك الأنظمة الحديثة التبديل من الليزر إلى الستارة عبر واجهة التشغيل HMI، مع تفعيل مراقبة زمن التوقف في كلا الوضعين. هذا الإعداد الهجين يتعامل مع ما يقارب 95% من عمليات التشكيل المعتادة. أما النسبة المتبقية 5%—الصناديق الضيقة، الأدوات الطويلة، والضربات المعقدة—فتتطلب انضباطًا. أحيانًا يعني ذلك استخدام وضع السرعة الآمنة لجزء من الحركة. وأحيانًا يعني إعادة تسلسل الانحناءات لإبقاء الأيدي بعيدة أثناء السرعة الكاملة.
ما لا يعنيه أبدًا هو تعطيل الجهاز لأن “القطعة تستمر في تشغيله”.”
رأيتُ مرة مشغلًا شابًا يمد يده حول منطقة مُخفَّفة جزئيًا لتثبيت جدار صندوق. تجاوز الكباس الحركة أكثر مما هو متوقع—تأخر هيدروليكي في صباح بارد. فقد طرف سبابته. قطع نظيف. بلا دراما. مجرد فكي فولاذ يُغلقان عدة مليمترات أكثر مما افترضته الأوراق.
يمكنك المجادلة مع جداول الإنتاج. لكن لا يمكنك المجادلة مع لزوجة الزيت والجاذبية.
إذا لم تتناول عملية تقييم المخاطر الهندسةَ المعقدة بشكل صريح، فسيفعل المفتش ذلك—وسيُسعِّر هذا الإغفال وفقًا لذلك.
الآن التقط قطعة عرضها بوصتان. بطبيعة الحال تكون أطراف أصابع المشغل على بُعد بوصة واحدة تقريبًا من فتحة القالب أثناء المحاذاة. عند سرعة الاقتراب الكاملة، تعتمد حمايتك الوحيدة على قدرة جهاز الكشف AOPD على اكتشاف التسلل وإصدار أمر التوقف قبل أن يتحرك الكباس أكثر من 14 مم.
وهذا يفترض أن النظام الهيدروليكي يستجيب فورًا وبشكل متكرر.
في مكابح الضغط القديمة، يتسبب زمن استجابة الصمام في وجود فجوة قابلة للقياس بين إشارة التوقف والتوقف الميكانيكي الفعلي. لقد سجّلت آلاتٍ استوفت المواصفات وهي دافئة، لكنها تجاوزتها عند البرودة بعدة مليمترات. هذا الانحراف يفرض أحد خيارين: زيادة مسافة الأمان—مما يقتل ميزة القرب—أو حصر حركة الكباس بسرعة ≤10 ملم/ث خلال كامل الحركة.
عشرة مليمترات في الثانية.
بهذه السرعة، تكون قد ألغيت ميزة الإنتاجية مقارنةً بالتحكم باليدين. تمتد أزمنة الدورات. يشعر المشغلون بالضجر. تبدأ الإدارة بالسؤال لماذا تبدو مكابح الليزر “الأسرع” بطيئة.
لأن الفيزياء هي من تضع الحد الأعلى.
أوضاع السرعة الآمنة موجودة لسبب. استخدم السرعة الكاملة للاقتراب مع تفعيل AOPD عندما يكون النظام مُعتمدًا. انتقل إلى السرعة الآمنة عندما يجب أن تبقى الأيدي قريبة ولا تسمح الهندسة بفصل كتم موثوق. برمجها. وثّقها. درّب عليها.
إذا كان جهاز الأمان لديك يحمي الماكينة بشكل أكثر موثوقية من جسم المشغل، فما الذي تحاول تحسينه بالضبط؟
تشغيل الأجزاء الصغيرة بسرعة كاملة دون بيانات توقف مُتحقق منها لا يخاطر بالأصابع فحسب—بل يُقامر بالحصول على مخالفة ستذكر الحد الأقصى لسرعة الكباس بالحبر الأسود.
هنا تخسر معظم الورش السلامة والإنتاج على السواء: يقومون بتركيب جهاز AOPD ثم ينسونه.
تتجمع ضبابات الزيت على عدسات الليزر. تُصدم الحوامل أثناء تغييرات القوالب. ترتخي ضفائر الأسلاك. لا يزال النظام يعمل. يظل المؤشر مضيئًا بالأخضر. لكن المحاذاة تنحرف ملمترًا واحدًا في كل مرة.
تكتشف أجهزة AOPD الحديثة المزوّدة بمراقبة زمن التوقف المدمجة أي انحراف وتُجبر النظام على السرعة الآمنة أو تُقفل الماكينة. يكره المشغلون ذلك. المشرفون يكرهونه أكثر. لذلك يقوم أحدهم بتعطيل المراقبة “مؤقتًا”.”
هو “متوافق”.”
إلى أن يأتي اليوم الذي يتسبب فيه التلوث بأخطاء كشف متقطعة وتعود الماكينة إلى ≤10 ملم/ث في كل شوط آخر. تنهار الإنتاجية. أو الأسوأ، يفشل النظام في اكتشاف يد أثناء اقتراب عالي السرعة لأن هندسة الشعاع انحرفت خارج حدود المعايرة المسموح بها.
الفحص البصري اليومي. التنظيف الأسبوعي. التحقق الموثق من زمن التوقف كل ثلاثة أشهر تحت الحمولة الكاملة. مراجعة تقييم المخاطر السنوي. هذه ليست أعمالًا بيروقراطية؛ بل هي ما يحافظ على 14 مم الوعد حقيقيًا وليس نظريًا.
أسرع طريقة لفقدان كلٍ من الحماية والإنتاجية هي أن تفترض أن المستشعر سينقذك بينما تتجاهل الصمام الذي لا يمكنه تحقيق المواصفات أو العدسة التي لم تمسحها منذ ستة أشهر.
تخطي هذا الانضباط، وسيكون الشخص التالي الذي يحسب مسافة التوقف مرتديًا شارة ويكتب أرقامًا تبدأ بعلامة الدولار.
لن تبقى جاهزًا للتفتيش بمجرد شراء ليزر. بل تبقى جاهزًا للتفتيش عندما تبني نظام تحكم يمكنه أن يثبت، عند الطلب، أن المكبس سيتوقف ضمن 14 مم تحت ظروف الإنتاج الحقيقية.
هذا هو التحول الذي يفوته معظم الورش. يعاملون نظام الكشف الضوئي النشط (AOPD) كترقية للإنتاجية ويتعاملون مع الامتثال كملف يوضع على الرف. تحت المعيار ANSI B11.3, ، هذان شيئان متطابقان. إذا لم تكن تدابير الحماية لديك موثوقة التحكم، ومتحقق منها، وموثقة قبل أول تشغيل إنتاج، فأنت لست ممتثلاً — أنت فقط محظوظ. والحظ ينفد في اليوم الذي يطلب فيه المفتش آخر تحقق من زمن التوقف تحت الحمولة الكاملة.
إذًا ليس السؤال “هل لدي ليزر؟”
بل “هل يمكنني الدفاع عن كل مليمتر من حركة المكبس بين الاكتشاف والتوقف؟”
“التحكم الموثوق” يعني أن العطل المفرد لا يمكن أن يؤدي إلى فقدان وظيفة الأمان. قنوات مزدوجة. تغذية راجعة مراقبة. صمامات مزدوجة احتياطية. اكتشاف أعطال يُجبر النظام على حالة آمنة. هذه هي لغة المعيار ANSI B11.3 وعائلة B11 الأوسع نطاقًا.
ستارة ضوئية مستقلة موصولة بدائرة قَابِض قديمة ليست كذلك. وكذلك الليزر المتصل بصمام لولبي واحد بدون مراقبة لموضع البكرة. إذا علق الصمام وتحرك المكبس بعد تجاوز 14 مم, ، فقد قام المستشعر بعمله. لكن النظام الهيدروليكي لم يفعل. والمعيار لا يمنح درجات على الجهد المبذول.
الدمج يعني أن إشارة الـ AOPD تُغذي نظام تحكم مصنّف للسلامة يراقب زمن التوقف باستمرار أو على فترات محددة. ويعني أن الصمامات الهيدروليكية لديك مصممة أو معدلة للموثوقية والتفقد الذاتي. ويعني أن العطل يُجبر النظام على السرعة الآمنة أو القفل — وليس “الاستمرار في الدورة على أي حال”.”
وهنا تنهار معظم عمليات التعديل. تضيف الورش مستشعرًا عالي الجودة إلى بنية تحكم بُنيت عام 1992 وتصفها بالحديثة. ويُعتبر هو “ملتزمًا.”
حتى يتتبع المفتش دائرة الأمان، ولا يجد مراقبة لاستجابة الصمام، ويسأل كيف تضمن مسافة التوقف التي تبرر التشغيل على مسافات قريبة. عندها تتحول المحادثة إلى مخالفة تحتوي على فواصل بالأرقام.
إذا كان جهاز الأمان لديك يحمي الماكينة بشكل أكثر موثوقية من جسم المشغل، فما الذي تحاول تحسينه بالضبط؟
أنت لا تبدأ بعرض الأسعار. بل تبدأ بتقييم المخاطر.
قبل أن يغادر أمر الشراء مكتبك، تقوم بتوثيق: طراز الماكينة، الحمولة بالطن، زمن التوقف المقاس في الحالة الدافئة والباردة، ارتفاعات أدوات التثبيت، الأشكال الهندسية المعتادة للأجزاء، نطاقات وصول المشغل، وأي المهام تقع داخل 14 مم نافذة الأهلية. إذا لم تتمكن الماكينة من التوقف باستمرار ضمن تلك النافذة، فالمعيار واضح وصريح: إنها لا تعمل بما يكفي لتركيب نظام حماية ضوئي قريب (AOPD).
وهذا ليس خياراً. بل استبعاد.
الآن، إليك الجزء غير الواضح عادةً: هذا التقييم يحمي الإنتاج بقدر ما يحمي السلامة. عندما ترسم خريطة للمهام التي تتطلب أوضاعاً هجينة — ليزر مع ستارة، أو ليزر مع سرعة آمنة — فإنك تتجنب حالة الذعر عصر الجمعة حين يقوم أحدهم بتعطيل قناة لأن “القطعة تستمر في إيقافها”. لقد حددت مسبقاً أي 5% من المهام تحتاج إلى حماية بديلة وقمت ببرمجتها وفقاً لذلك.
المفتشون لا يتوقعون الكمال. بل الدليل. تقييم مخاطر مكتوب يشير إلى المعيار ANSI B11.3 بنود محددة، اختبارات وقت التوقف الموثقة أثناء الحمل، وأوضاع الحماية المعرفة لكل فئة من المهام — كل هذا يخبرهم بأنك تدير المخاطر بدلاً من أن تتفاعل معها.
اشرَح لهم تلك الحسابات بهدوء.
أو دَعهم يقومون بها بأنفسهم باستخدام آلة حاسبة وجدول غرامات.
تحكم اليدين المزدوجين درّب جيلاً كاملاً على الابتعاد عن الفكين والضغط على الأزرار حتى ربع بوصة قبل القاع. لم يكن ذلك مجرد أسلوب عمل؛ بل ذاكرة عضلية. حين تنتقل إلى تشغيل بدواسة قدم مع نظام AOPD قريب المدى، فإنك تطلب من المشغلين إمساك الأجزاء قريباً من الفولاذ المتحرك والثقة بتوقيت التوقف.
الثقة لا تأتي من دليل التشغيل. بل من العرض العملي.
تُريهم مسافة التوقف المقاسة. وتشرح لهم ما 14 مم يعنيه ذلك فيزيائياً — أقل من سُمك الخنصر. وتُظهر ظروف الأعطال: حجب الشعاع، راقب الماكينة تُجبَر على السرعة الآمنة. حاكِ عطل الصمام وأظهر الإغلاق الآمن. الآن لم يعد النظام سحرياً؛ بل يمكن التنبؤ به.
وذلك قبل أن تحسب التردّدات الدقيقة، أو الأخطاء في ضغط الأزرار، أو الوضعية غير المريحة التي تُبطئ التموضع. عندما يدرك المشغّلون أنهم يستطيعون تثبيت الأجزاء الصغيرة بشكل طبيعي، والتشغيل بدواسة القدم، والحفاظ على سرعة الاقتراب الكاملة لأن وقت التوقف تم التحقق منه، يتوقف الصراع بين الإنتاج والسلامة.
لكن عليك أيضاً تدريب الحدود. أي المهام تتطلب سرعة آمنة. وأيها تتطلب التبديل إلى وضع الستارة. وأيها تتطلب العودة إلى التحكم المزدوج باليدين لأن الهندسة تُعيق استشعار القرب. نظام AOPD يتفوق على التحكم المزدوج باليدين عندما يكون الخياران ممكنين؛ لكنه لا يُلغي الحاجة إليه من أدواتك.
كن واضحاً في ذلك، وإلا سيبتكر المشغل حلاً من تلقاء نفسه.
والابتكار في هذا السياق هو ما يسميه المفتشون “تعمد.”
إليك المنظور الذي أريدك أن تحتفظ به مستقبلاً: الامتثال ليس اختيار جهاز. بل سلسلة من الحقائق الفيزيائية القابلة للدفاع، متصلة بموثوقية التحكم، موثقة قبل الإنتاج، ومعزَّزة حتى تُعيد تشكيل ذاكرة العضلات.
عندما تبني النظام على هذا الأساس، فإن فكّي الفولاذ لا يصبحان أبطأ. بل أكثر قابلية للتنبؤ. وهذه القابلية للتنبؤ هي ما يسمح لك بالعمل بكامل السرعة دون المجازفة بالأصابع أو بالغرامات.
الآن انظر إلى أقدم مكبح لديك واسأل نفسك سؤالاً صعباً: هل يمكنه فعلاً التوقف في الوقت المناسب؟ 14 مم— بارداً، محملاً، ومتحققاً — أم أنك تصمم استراتيجية أمان حول آلة لم تكن مؤهلة في الأساس؟


















